
Интересное сегодня


Механизмы социального взаимодействия у приматов
Процессы, лежащие в основе социального взаимодействия у людей, могут также играть роль в коммуникации с небиологическими агентами, такими как роботы или андроиды. Исследования в области взаимодействия человека и робота затрагивают механизмы эмпатии, принятия перспективы и сенсомоторного моделирования, которые модулируются степенью знакомства наблюдателя с агентом или действием.
Изучение невербального поведения животных проливает свет на эволюционные истоки социальных механизмов. Хотя большинство исследований сосредоточено на внутривидовых взаимодействиях, кросс-видовые работы расширяют понимание таких феноменов, как заразная зевота. В данном исследовании мы изучаем реакцию шимпанзе на действия небиологического агента — андроида.
Методология эксперимента
Участники и условия
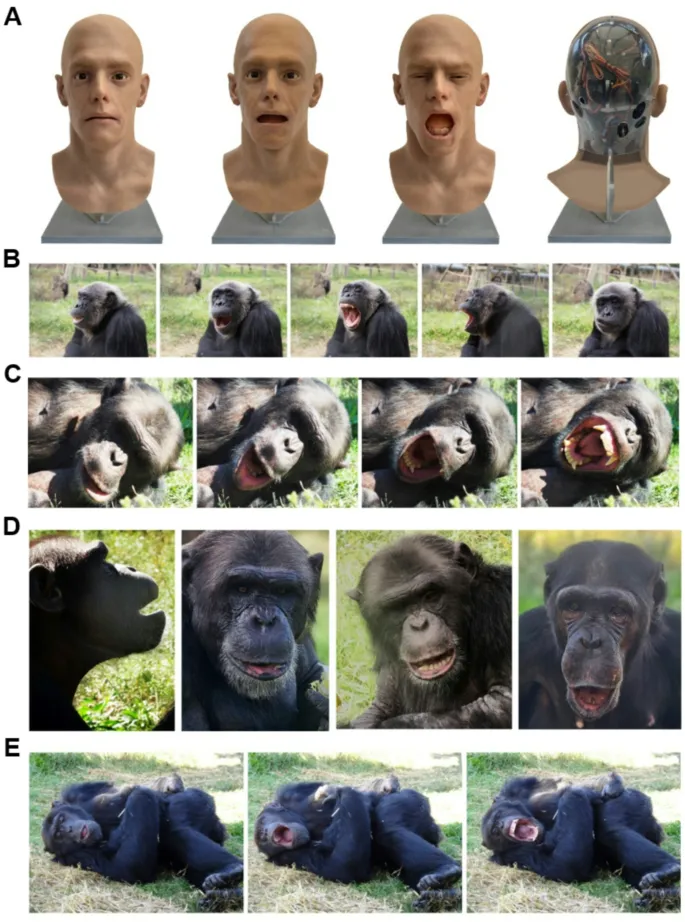
В исследовании участвовали 14 взрослых шимпанзе (Pan troglodytes) в возрасте от 10 до 33 лет. Животные содержались в естественных условиях в приюте Fundació Mona (Испания). Эксперимент проводился с использованием андроида, способного воспроизводить три типа лицевых движений: зевок (Yawn), частичное открытие рта (Gape) и нейтральное выражение (Close).
Дизайн андроида
Андроид высотой 45 см был оснащен 33 сервомоторами для точного воспроизведения мимики. Движения программировались на языках C/C++, Python и MATLAB, имитируя биологическую динамику человеческого лица. Каждое действие длилось 10 секунд и повторялось 15–20 раз за 5-минутную сессию.
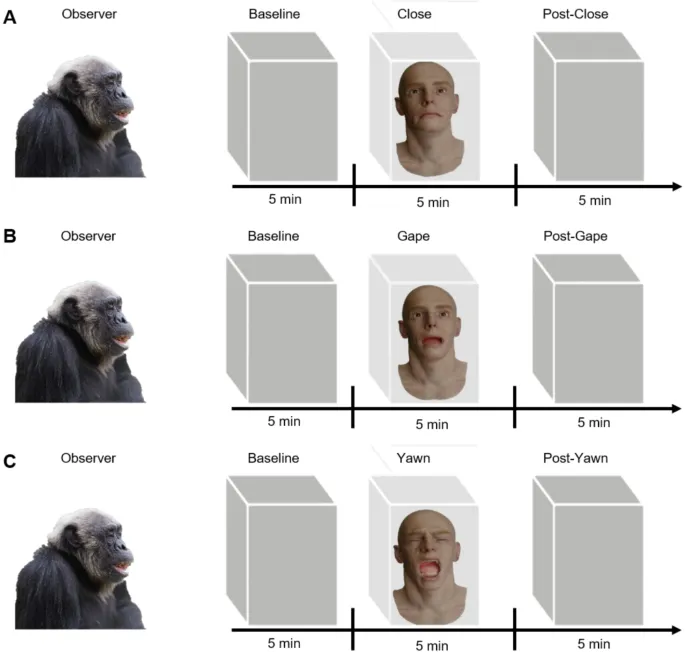
Процедура
Эксперимент состоял из трех фаз: базовой (без стимула), демонстрации андроида и пост-стимульной. Поведение шимпанзе фиксировалось на видео и анализировалось независимыми кодировщиками. Основные измеряемые параметры: количество зевков, время, проведенное лежа, и продолжительность взгляда на андроид.
Результаты и их значение
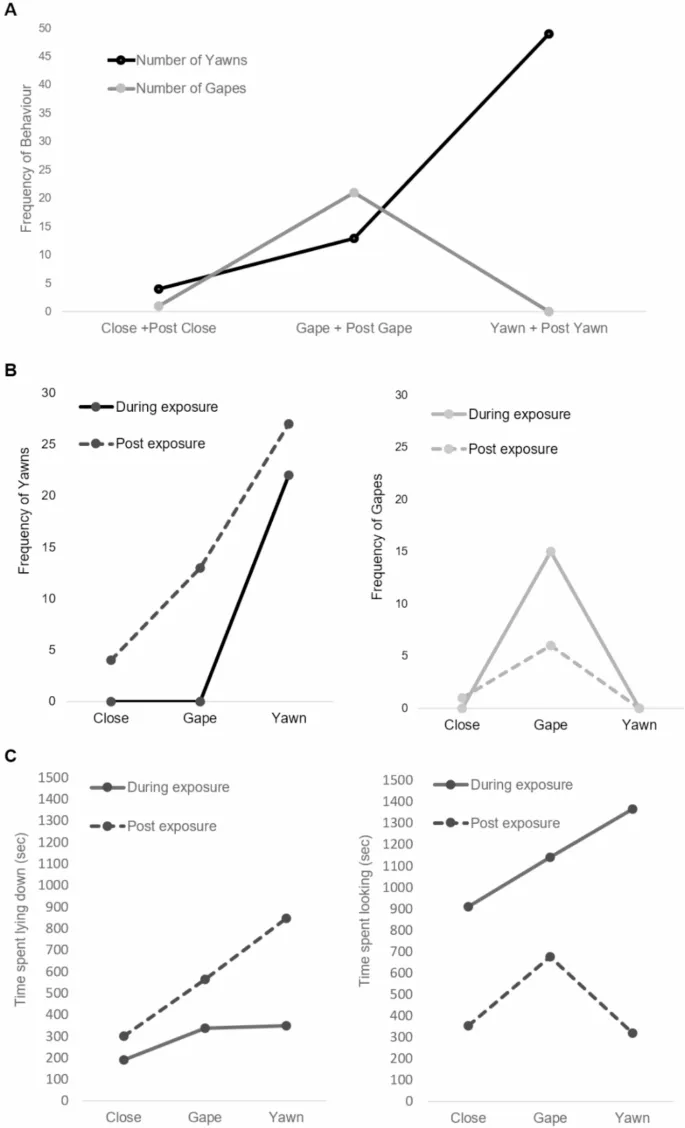
57.1% шимпанзе демонстрировали заразную зевоту в ответ на зевки андроида. Наибольшая реакция наблюдалась при полном открытии рта (Yawn), меньшая — при частичном (Gape), и отсутствовала в Close-условии. Кроме того, животные чаще лежали после наблюдения зевков, что может указывать на ассоциацию зевоты с отдыхом.
Эти результаты подтверждают, что заразная зевота не требует социальной близости или биологического агента, а может запускаться искусственными стимулами. Исследование подчеркивает эволюционную роль зевоты как невербального сигнала и открывает новые направления для изучения кросс-видовых и кросс-агентных взаимодействий.





