Интересное сегодня
Введение в исследование визуального отслеживания
Человеческий мозг обладает удивительной способностью отслеживать визуальные цели, даже когда они временно скрыты из виду. В повседневной жизни мы постоянно следим за движущимися объектами: наблюдаем за конкретным ребенком на оживленной детской площадке, следим за приближающимися автомобилями перед переходом дороги. В профессиональных областях, таких как спорт или вождение, эффективное отслеживание объектов поддерживает высокопроизводительное визуомоторное поведение. Понимание принципов работы системы отслеживания может пролить свет на важный компонент повседневных и экспертных навыков. Но что на самом деле означает «хорошее» или «эффективное» отслеживание?
Парадокс оптимального отслеживания
Интуитивно идея оптимального отслеживания кажется простой: взгляд должен оставаться на цели (нулевая позиционная ошибка), а его скорость должна соответствовать скорости цели (нулевое retinal slip, или единичный gain). Это представление отражено в распространенных практиках анализа, где сигнал взгляда десаккадируется, а затем скорость плавного слежения сравнивается со скоростью цели, при этом единичный gain представляет предполагаемое идеальное отслеживание. Однако давно известно, что визуальное отслеживание relies на взаимодействии плавного слежения и саккад: плавное слежение приближается, но редко точно соответствует скорости цели, в то время как саккады быстро reposition взгляд, чтобы догнать или перепрыгнуть вперед.
Методология исследования
В исследовании приняли участие десять участников (8 женщин, 2 мужчины в возрасте от 21 до 40 лет), набранных через университетские рассылки. Все участники сообщили о нормальной или скорректированной до нормальной остроте зрения и об отсутствии известных состояний, влияющих на движения глаз. Эксперимент проводился в полном соответствии с этическими принципами Финского национального совета по честности исследований (TENK) и Комитета по этике исследований Университета Хельсинки в области гуманитарных, социальных и поведенческих наук.
Оборудование и программное обеспечение
Движения глаз записывались с помощью бинокулярного, надеваемого на голову айтрекера Pupil Core, с associated открытым программным обеспечением Pupil Capture v0.9.12, используемым для записи и калибровки. Камеры глаз записывали с частотой 120 Гц с разрешением 640×480 пикселей, в то время как фронтальная камера сцены записывала с частотой 60 Гц с разрешением 1280×720 пикселей. Четыре оптических маркера были размещены по углам экрана для оценки позы головы и mapping взгляда с изображения фронтальной камеры гарнитуры на координаты экрана.
Дизайн эксперимента
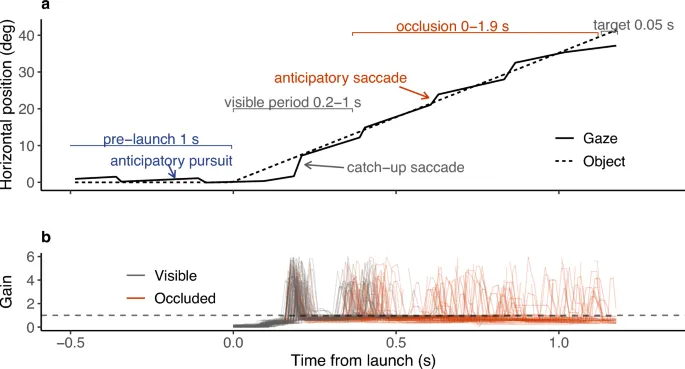
Каждый участник отслеживал объект, движущийся по линейной горизонтальной траектории, с чередованием направления, всего 120 trials в четырех блоках (тренировочный блок без окклюзий и три блока с окклюзиями). Каждый trial начинался с позиционирования объекта примерно в 27 градусах слева или справа от горизонтальной середины экрана, видимого в течение одной секунды перед запуском. В trials с окклюзией движущийся объект был виден в течение 0,2–1 секунд (рандомизированно), occluded в течение 0–1,9 с (рандомизированно; медиана = 0,53 с, среднее = 0,58 с) и ненадолго reappeared с Landolt C в течение 0,05 с.
Анализ данных и модель точности задачи
На основе рейтингов достоверности точек данных взгляда программным обеспечением Pupil Capture (0–1; соотношение обнаруженной длины края зрачка и длины окружности подобранного эллипса) данные с достоверностью менее 0,8 были исключены. Позиции взгляда были отображены как визуальные углы путем предположения, что монитор имеет горизонтальное поле зрения 80 градусов, поэтому использовался коэффициент 80/1920 для вычисления визуальных углов из позиций пикселей монитора.
Классификация саккад и плавного слежения
Саккады и плавные слежения были классифицированы с использованием метода NSLRHMM (Nonlinear System Identification and Regression using Hidden Markov Models — идентификация нелинейных систем и регрессия с использованием скрытых марковских моделей). Сначала оценивается кусочно-линейная регрессия сигнала взгляда, после чего resulting линейные сегменты классифицируются с использованием скрытой марковской модели на основе скоростей сегментов и изменений направления.
Психометрическая модель
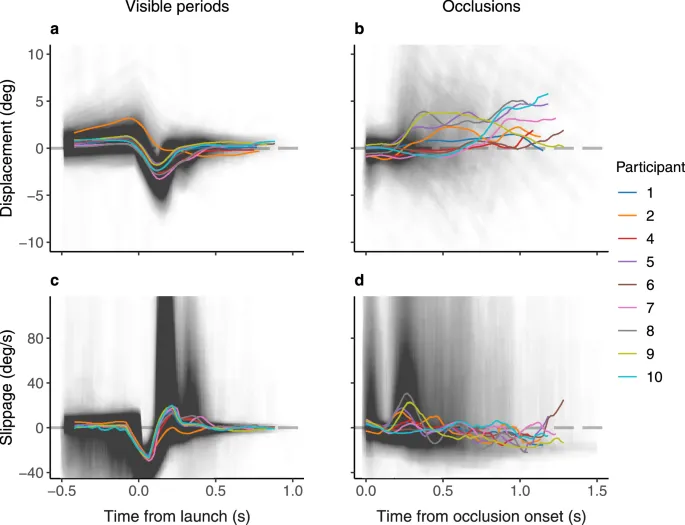
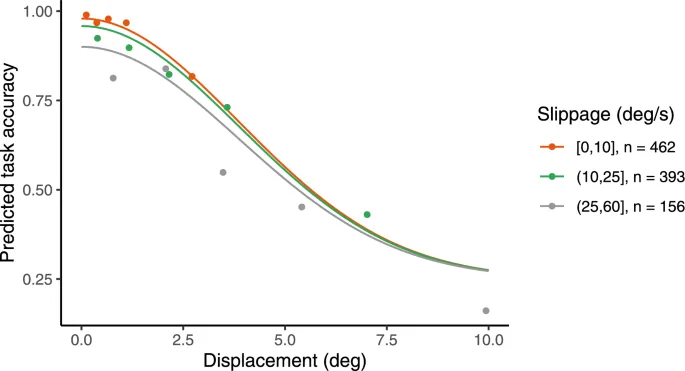
Для количественной оценки факторов, влияющих на перцептивную производительность, то есть точность задачи, мы сформулировали психометрическую модель на основе outcomes задачи дискриминации (успех или неудача), displacement (позиционная разница между взглядом и целью) и slippage (разница в скорости между взглядом и целью). Displacement и slippage измерялись в момент reappearance цели, исходя из предположения, что этот момент наиболее непосредственно relevant для ответа участника.
Мы предположили психофизическую взаимосвязь между displacement, slippage и визуальным восприятием: а именно, что визуальная точность экспоненциально decay с увеличением абсолютного displacement и slippage.
Результаты исследования
Участники продемонстрировали высокую производительность в задаче дискриминации в trials с окклюзией: девять из десяти достигли показателей успеха между 69% и 93% (в среднем 78%, 95% ДИ [73, 83]) при случайном шансе 25%. Это было, в среднем, на десять процентных пунктов хуже, чем в тренировочном блоке без окклюзий (95% ДИ [5, 15]).
Характеристики поведения взгляда
Перед началом движения позиция взгляда в среднем немного опережала цель: участники совершали anticipatory слежения в направлении предстоящего движения, которым обычно следовали return саккады обратно в стартовую позицию. Вскоре после запуска взгляд tend отставал, требуя одной или двух саккад, чтобы догнать видимую цель. После initial catch-up саккад gazetarget displacement в течение видимого периода был низким, и цель отслеживалась с помощью плавного слежения, сопровождаемого небольшими catch-up саккадами.
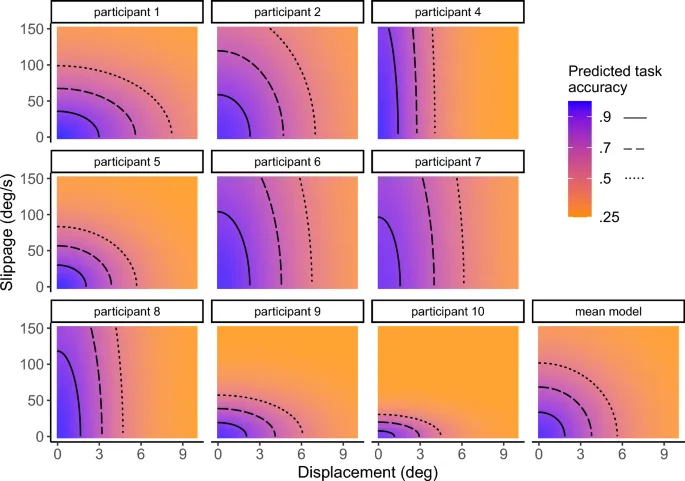
Влияние displacement и slippage на точность задачи
Мы обнаружили, что отслеживание цели с близкой позицией и ограниченной разницей в скорости положительно влияет на производительность задачи дискриминации. У всех участников наблюдаемая точность задачи была highest при малом displacement, превышая 90 процентов, когда displacement составлял не более 2,5 градусов. Даже при больших значениях slippage общая точность задачи оставалась высокой, пока displacement был small, что highlights displacement как доминирующий фактор успеха задачи.
Метрика качества отслеживания во время окклюзии
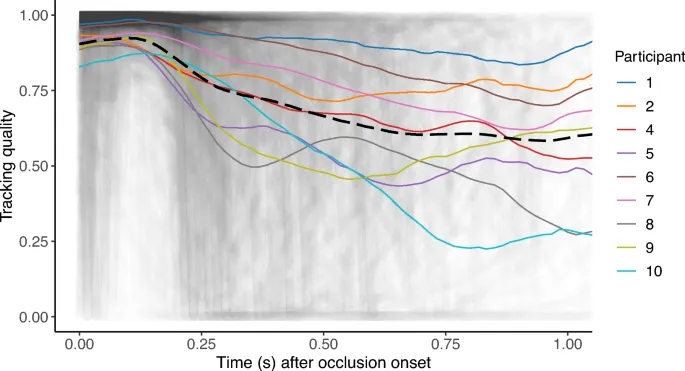
На основе модели точности задачи мы derived integrated меру качества отслеживания для оценки поведения взгляда во время окклюзии, учитывая как displacement, так и slippage в данный момент времени. Для меры качества отслеживания мы omitted параметры, связанные со структурой behavioral задачи, а именно уровень шанса и вероятность lapse. Это означает, что качество отслеживания может range от 0 до 1, где 1 подразумевает «идеальное» отслеживание.
Динамика качества отслеживания
В среднем значение качества отслеживания составляло 0,89 (95% ДИ [0,86, 0,92]) в начале окклюзии. Качество отслеживания decayed со временем; после 600 мс оно составляло в среднем 0,63 (95% ДИ [0,52, 0,74]). Напротив, качество отслеживания во время визуально управляемого отслеживания оставалось высоким (в среднем = 0,97, 95% ДИ [0,96, 0,98] через 600 мс после запуска).
Обсуждение результатов
В этом исследовании мы характеризуем patterns поведения взгляда, наблюдаемые, когда участники отслеживали линейное движение через прерывистые окклюзии для выполнения задачи визуальной дискриминации. Таким образом, мы aim понять implications patterns взгляда для производительности задачи. Мы представляем модель для понимания того, как поведение взгляда relates к целям задачи, focusing на взаимосвязи между displacement (позиционная разница между взглядом и целью), slippage (разница в скорости между взглядом и целью) и производительностью задачи дискриминации.
Теоретическая и практическая значимость
Наша детальная характеристика поведения взгляда revealed distinct patterns на протяжении всей задачи отслеживания. До начала движения участники обычно демонстрировали anticipatory плавные слежения с return саккадами обратно к stationary позиции цели. По мере приближения момента запуска взгляд typically led stationary цель slightly, отражая anticipation будущей траектории объекта, что согласуется с предыдущими findings об anticipatory движениях глаз.
Наша метрика качества отслеживания, derived из модели точности задачи, предоставляет инструмент для continuous оценки производительности отслеживания на протяжении периодов окклюзии.
Ограничения исследования и будущие направления
Хотя наш размер выборки был small, он был типичным для исследований айтрекинга отслеживания затененных целей. С большим количеством trials на участника этого было достаточно для демонстрации концепции качества отслеживания с использованием within-participant подхода к моделированию, предлагая stepping stone для будущих исследований. Однако небольшое количество участников ограничило нашу способность систематически исследовать индивидуальные различия.
Перспективы дальнейших исследований
Будущие исследования с большими выборками могли бы изучить, отражают ли вариации patterns взгляда между участниками – например, reliance на саккады versus плавное слежение во время окклюзии – различия в стратегии, истории обучения или oculomotor контроле, среди других факторов. Кроме того, было бы ценно исследовать, как поведение взгляда и качество отслеживания развиваются в течение repeated trials, предполагая, что участники адаптируют свое поведение взгляда на основе обратной связи и опыта.
Принцип построения меры качества отслеживания на основе целей и условий задачи, а не нашей модели как таковой, может быть generalized к различным scenarios. В будущих исследованиях тот же принцип может быть applied к более сложным designs с различными элементами, влияющими на производительность. Ключевыми prerequisites являются то, что участники имеют четкие цели и обратную связь, и что достижение целей задачи может быть measured.