Интересное сегодня

Введение в проблему восприятия роботов
При взаимодействии с нечеловеческими сущностями, такими как роботы или аватары, мы склонны упускать их индивидуальные характеристики и возможности, воспринимая их как однородную группу. Этот недостаток дифференциации проистекает из ограниченного опыта или мотивации обрабатывать их индивидуально, что приводит к снижению перцептивной дискриминации (т.е., индивидуации). Однако в человеко-машинных командах распознавание уникальности каждого члена-робота имеет решающее значение для поддержания доверия и производительности команды. Неспособность сделать это приводит к предположениям о всей группе на основе опыта взаимодействия только с одним членом.
Важность индивидуации для доверия в командах
Позитивный опыт может привести к чрезмерной зависимости от всех роботов, в то время как негативный опыт может создать широко распространенное недоверие. Это обобщение, известное как SystemWide Trust (SWT) или Системное Доверие, наносит вред командной работе, влияя на производительность и перегружая человеческих операторов. Один из способов улучшить калибровку доверия — это воспринимать уникальные возможности каждого робота и избегать обобщений (т.е., ComponentSpecific Trust или Компонентно-Специфическое Доверие, CST). CST способствует лучшей производительности и отношению в человеко-машинных командах за счет дифференциации агентов и разработки агент-специфических убеждений.
Когнитивные механизмы восприятия лиц
Для генерации CST необходимо уметь надежно индивидуировать роботов-агентов. Обширные исследования изучили причины, по которым мы воспринимаем агентов как уникальных или взаимозаменяемых. Установленным феноменом является тенденция видеть членов незнакомых групп более похожими, чем они есть на самом деле (т.е., гомогенность аутгруппы). Гомогенность аутгруппы возникает, когда люди сосредотачивают внимание на категориально-специфичных чертах агента (т.е., чертах, которые агент имеет общего с большинством других членов группы), а не на индивидуализирующих чертах других (т.е., чертах, которые отличают агента от других членов группы).
Роль конфигуральной обработки
Для людей наиболее важные сигналы для индивидуации получаются из их лица. Эти сигналы включают вариативную информацию лица, отражающую внутренние состояния человека (т.е., эмоции, намерения), а также инвариантную информацию лица, связанную с личностью человека (например, пол, возраст, этническая принадлежность), и существуют области человеческого мозга, которые специально обрабатывают эту информацию. В соответствии с нейронной специализацией, когнитивная обработка человеческих лиц также уникальна по сравнению с другими стимулами: в то время как большинство визуальных стимулов обрабатываются посредством поэтапной интеграции отдельных features, лица обрабатываются конфигурально, то есть как интегрированный гештальт.
Эксперимент 1: Сравнение индивидуации людей и роботов
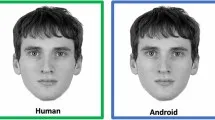
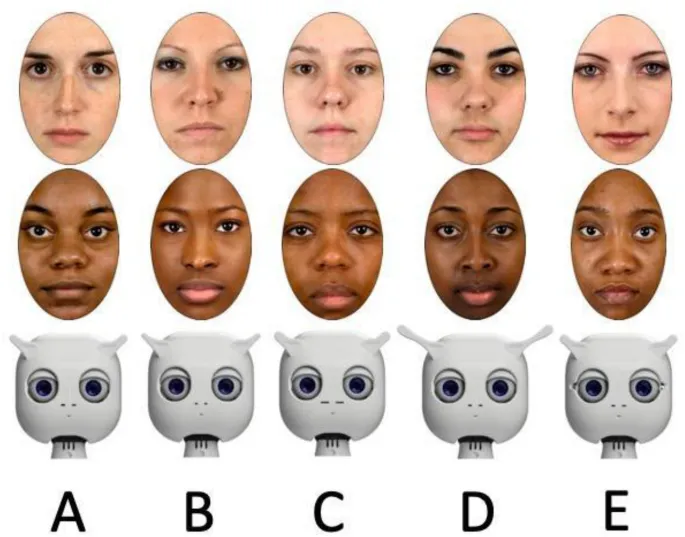
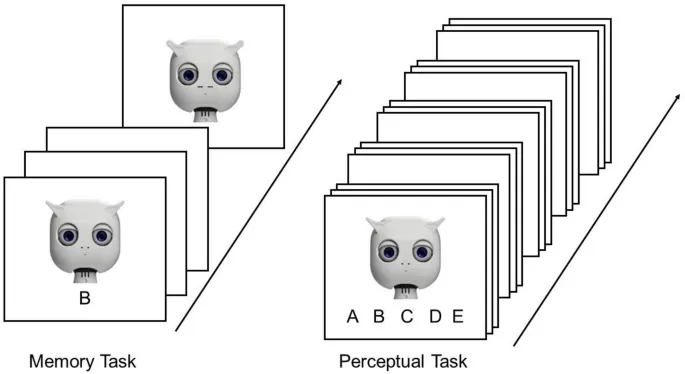
Целью Эксперимента 1 было исследовать, могут ли люди индивидуировать роботов на основе их facial features, и если да, то как их производительность индивидуации сравнивается с человеческими стимулами «ингруппы» и «аутгруппы». Для изучения этого вопроса участники выполнили задание на индивидуацию с одной из трех групп лиц: белые человеческие лица (т.е., расовая «ингруппа» для белых участников), черные человеческие лица (т.е., расовая «аутгруппа» для белых участников) или лица роботов; тип лица варьировался между участниками.
Методы и материалы
253 белых участника завершили эксперимент на Amazon Mechanical Turk через платформу turkprime. Из всей выборки 83 участника были assigned к условию «черные человеческие лица» (BHF), 82 — к условию «белые человеческие лица» (WHF) и 88 — к условию «лица роботов» (RF). После исключений по различным критериям окончательный размер выборки составил 225 участников. Участники получили $0,50 за участие.
Результаты Эксперимента 1
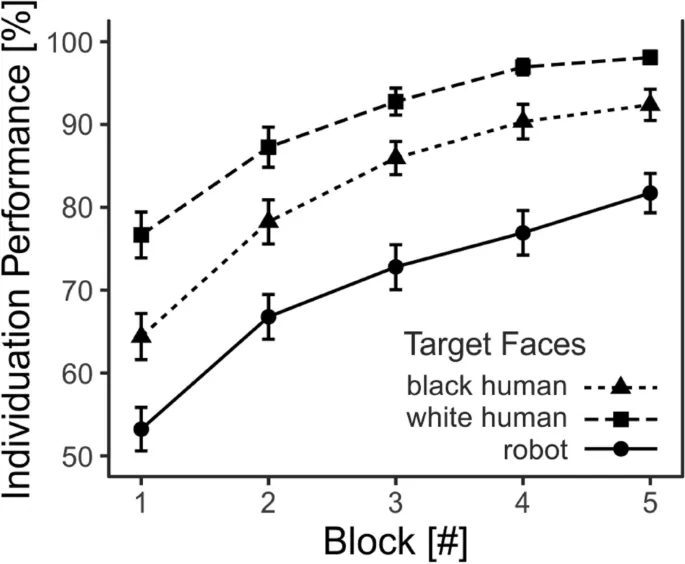
Производительность индивидуации значимо зависела от Номера Блока и Целевого Лица. Пост-hoc тесты показали, что участники показали лучшие результаты при индивидуации белых лиц по сравнению как с черными, так и с лицами роботов. Участники также лучше индивидуировали черные лица по сравнению с лицами роботов. Все участники научились индивидуировать лица в ходе эксперимента, так как производительность индивидуации для Блока 5 была значительно выше, чем для Блока 1.
Эксперимент 2: Влияние физической человекообразности
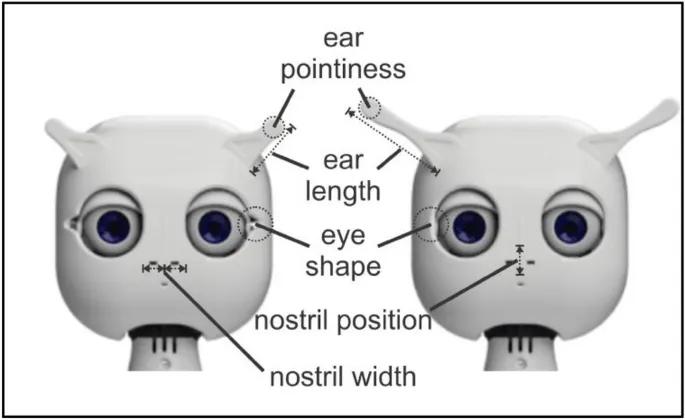
В Эксперименте 2 мы исследовали, влияет ли перцептивное сходство натуралистичных роботизированных стимулов с человеческими лицами на производительность индивидуации. В частности, мы изучили, модулирует ли количество лицевых features робота — один из основных determinants физической человекообразности — индивидуацию роботов.
Методы и материалы
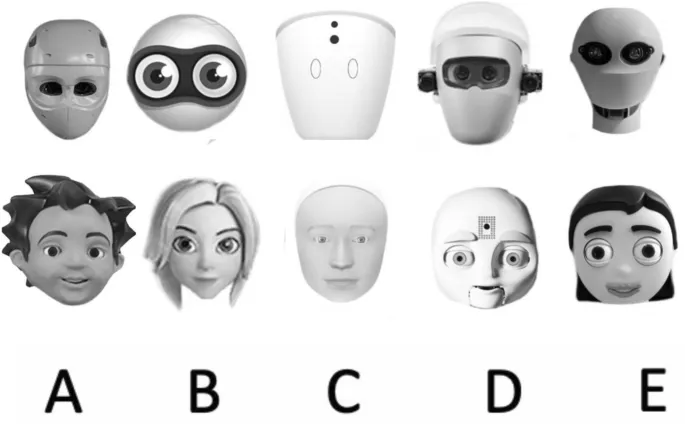
В общей сложности 192 участника различного расового происхождения завершили эксперимент. После исключений окончательный размер выборки составил 177 участников. В отличие от Эксперимента 1, мы предварительно отобрали натуралистичные лица роботов на основе количества человеческих лицевых features, которые они отображали, до того как участники выполнили задание на индивидуацию: роботы с низким количеством человеческих лицевых features (только глаза = низкое сходство с лицом; LFL) против роботов с высоким количеством человеческих лицевых features (брови, глаза, нос и рот = высокое сходство с лицом; HFL). Человеческое сходство с лицом варьировалось внутри участников.
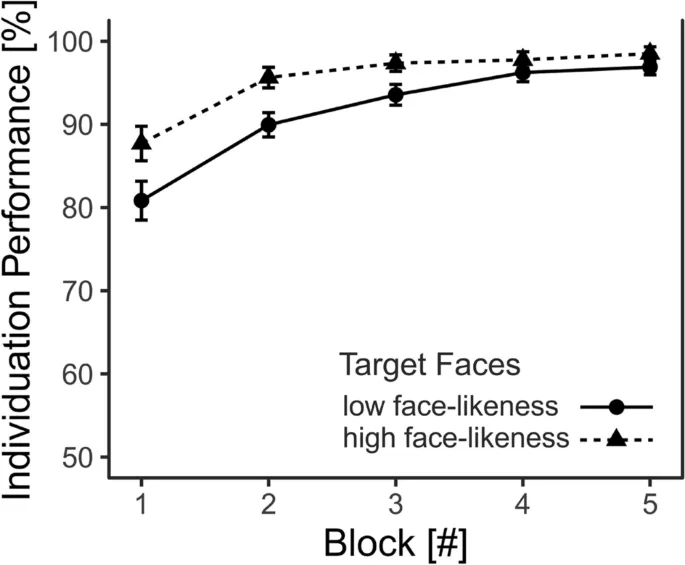
Результаты Эксперимента 2
Производительность индивидуации значимо зависела от Номера Блока. Целевое Лицо также было значимым, причем участники показали значительно лучшие результаты при индивидуации лиц HFL по сравнению с лицами LFL. Номер Блока и Целевое Лицо также значимо взаимодействовали в своем влиянии на производительность индивидуации. Последующий анализ взаимодействия показал, что участники хуже индивидуировали лица LFL по сравнению с лицами HFL в начале эксперимента. Однако эта разница не была очевидна в конце эксперимента.
Общее обсуждение и выводы
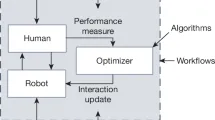
С инженерными advances становится все более распространенным, что люди работают с командами роботов вместо работы с ними в индивидуальных settings. Однако для эффективной работы с членами команды роботов нам необходимо уметь различать их индивидуальные способности, а не воспринимать их как однородную группу. Это известно как калибровка доверия, и это критически важный вопрос в человеко-машинном teaming, так как это позволяет нам appropriately allocate задачи членам команды роботов на основе их фактических наборов навыков.
Результаты настоящего исследования показывают, что хотя люди способны индивидуировать роботов, они делают это в меньшей степени, чем человеческие стимулы как ингруппы, так и аутгруппы. Кроме того, роботы, которые физически более человекообразны, initially индивидуируются лучше по сравнению с роботами, которые физически менее человекообразны; однако этот эффект уменьшается в ходе эксперимента, что позволяет предположить, что индивидуацию роботов можно изучить довольно быстро.
Целью настоящего исследования было изучить перцептивную дискриминацию социальных роботов, которые differed по количеству лицевых features. В соответствии с нашими гипотезами, мы обнаружили, что (i) люди индивидуируются лучше, чем роботы, и что (ii) роботы с большим количеством человеческих лицевых features были легче индивидуированы, чем роботы с малым количеством человеческих лицевых features. Это согласуется с недавними исследованиями в области HRI, изучающими влияние лицевых features на конфигуральную обработку, и это первое исследование, которое specifically изучает влияние лицевых features на производительность индивидуации.
Практические последствия для HRI
Импликация для HRI заключается в том, что человеко-машинные команды, состоящие из роботов с более человекообразными лицевыми features, вероятно, будут испытывать лучшую производительность команды due to того, что человеческие операторы лучше распознают individual роботов и их уникальные capabilities и accordingly назначают им specific задачи. Однако в будущей работе необходимо непосредственно исследовать калибровку доверия в контексте индивидуации.





