Интересное сегодня
Использование виртуальной реальности для обучения операторов сонара: развитие навыков пространственной интерпретации
В современной военно-морской практике операторы гидролокационных станций (сонаров) должны обладать развитой способностью к пространственной ориентации и пониманию ситуации. Это включает в себя способность мысленно перемещаться в другие пространственные позиции, представляя, что можно «увидеть» с этих точек и как они соотносятся друг с другом. Этот навык, иногда называемый перцептивным принятием перспективы 2-го типа (Type 2 perspectivetaking), является ключевым для интерпретации широкополосных дисплеев сонара, отслеживающих пеленг во времени (timebearing SONAR displays).
Дисплеи пеленга во времени: вызовы для операторов
Эти дисплеи, также известные как Bearing Time Records или Waterfall Plots, на первый взгляд могут напоминать обычные карты. Однако информация о пространственном положении представлена в виде пеленгов (полярных координат), организованных в декартовой системе, где пары (x,y) соответствуют пеленгу и времени (см. Рис. 1a). Такие графики широко используются при навигации с помощью пассивного сонара, но создают значительную когнитивную нагрузку на операторов, которым необходимо их интерпретировать (Fay et al., 2019).
Интерпретация этих дисплеев требует значительных пространственных навыков, поскольку операторам необходимо:
- Интегрировать информацию о судне, на котором они находятся (часто называемом «собственное судно» или “ownship” в литературе).
- Учитывать влияние расстояния до цели (которое напрямую не отображается).
- Работать с нелинейными преобразованиями между отображаемыми данными и скоростью отслеживаемой цели (см. Kirschenbaum et al., 2009, 2011 для детального обсуждения).
Несмотря на существующие усилия по симуляции, геймификации или виртуализации рабочих задач для целей обучения или оценки (например, управление перископом, da Silva, 2016; обязанности офицера на палубе, Vincenzi et al., 2003), относительно мало работ было посвящено использованию виртуальной реальности (VR) для исследования того, могут ли новые форматы отображения способствовать улучшению навыков и производительности операторов сонара.
Новый подход: VR-дисплей в эгоцентрической системе координат
В данном исследовании был реализован новый VR-инструмент для представления дисплеев пеленга во времени в эгоцентрическом (отличным от аллоцентрического) формате. Целью было проверить, помогут ли такие дисплеи новичкам в оценке локализации объектов, как при использовании нового поддерживающего устройства, так и после его удаления.
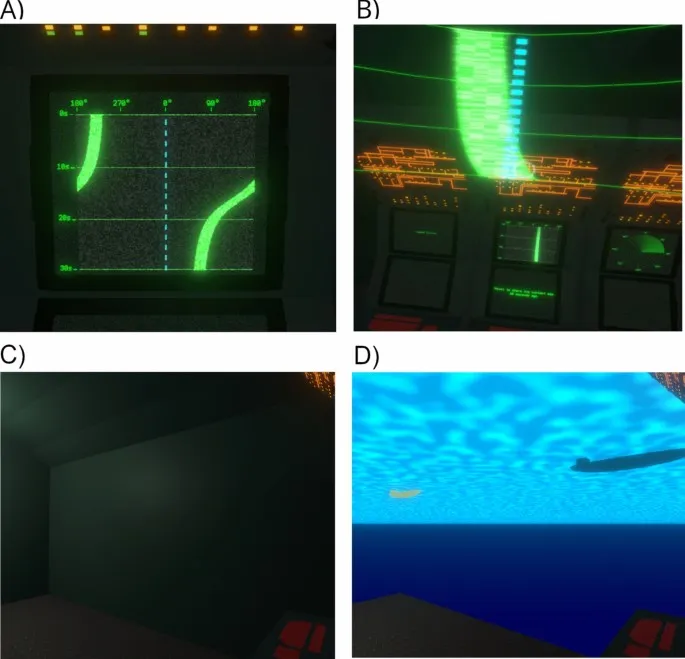
Рис. 1. Виртуальная среда. Обратите внимание: скриншоты виртуальной среды во время выполнения задания. Панель A показывает пример дисплея пеленга во времени, который отображается на стационарной консоли в VR-сцене. Подобные графики присутствовали непрерывно на всех этапах и для всех участников. На переднем плане панели B показан фрагмент виртуального, полупрозрачного наложения, используемого для поддержки принятия решений, с традиционным дисплеем пеленга во времени, показанным на консоли на заднем плане. Это наложение было предложено только группе «поддерживаемых». Панели C и D изображают перспективу участника непосредственно до и после выполнения ориентировочной реакции. До реакции участник видит только стену подлодки (Панель C). После указания ответа щелчком кнопки непрозрачная стена исчезает, открывая сцену за ней (Панель D), предоставляя обратную связь. В данном случае участник дал точный ответ, и текущее положение целевого судна (серое) и его предыдущее положение (желтое) видны.
Дисплеи пеленга во времени: детальный анализ
Широкополосный дисплей сонара представляет собой двухмерное представление, где по оси X откладывается пеленг, а по оси Y — время (см. Рис. 1a). Интенсивность сигнала (или контакта) часто отображается цветом или яркостью значка на пересечении соответствующих временных и пеленговых координат (представляя третью размерность, которая не использовалась в нашей упрощенной задаче). Обычно пеленг центрируется на Севере (0°), а крайние точки слева и справа указывают на Юг (180°). Время отображается таким образом, что самые последние данные появляются в верхней части, а новая информация вытесняет старую вниз (подобно водопаду).
Операторы используют эти дисплеи в сочетании с дополнительными источниками информации, включая необработанные акустические данные и другие аналитические методы и форматы отображения, такие как используемые для анализа движения цели (Target Motion Analysis, TMA), которые более тесно напоминают аллоцентрический вид сверху, используемый на обычных картах. Интеграция данных из этих источников требует значительных умственных усилий (Fay et al., 2019).
В связи с этим многие исследования когнитивных процессов у подводников фокусируются на более сложных задачах, связанных с интеграцией данных между ролями. Например, исследовались:
- Роль общих дисплеев в обеспечении распределенного познания среди подводников (Michailovs et al., 2023, 2024).
- Форматы визуализации для управления неопределенностью при интерпретации сонара (Kirschenbaum et al., 2014).
- Влияние рабочей нагрузки, прерываний и автоматизированной помощи на управление траекториями (Chen et al., 2017; Loft et al., 2015a, 2015b; Tatasciore et al., 2018).
Меньше внимания уделялось фундаментальным пространственным навыкам, необходимым для формирования базового понимания ситуации с использованием дисплея пеленга во времени (см. Hillyard et al., 1994). Опытные навигаторы, кажется, без труда интерпретируют эти дисплеи, но эта легкость, вероятно, является результатом существенной экспертизы (Kischenbaum et al., 2009).
Например, распространенная задача операторов акустической борьбы — определить точку максимального сближения (point of closest approach). Как это представить на таком дисплее? Интуитивно кажется, что ответ не очевиден; точка максимального сближения обозначается «S»-образным паттерном на данных, или, более технически, местом, где скорость изменения пеленга максимальна.
Представленная задача сосредоточена на еще более простом, но основополагающем навыке: сопоставлении одного отображаемого контакта с его местоположением в эгоцентрическом пространстве, или, проще говоря, указании на целевое судно.
Когнитивные навыки, задействованные в локализации
Выполнение таких суждений требует удивительно широкого спектра когнитивных навыков и, вероятно, включает сложное взаимодействие дискретных ментальных процессов, которые обычно развиваются в детстве (Flavell et al., 1981), включая умственное вращение (mental rotation), ингибирование (inhibition) и пространственное мышление (spatial reasoning) (Michelon & Zacks, 2006; Qureshi et al., 2010).
Даже если ограничиться только навыками пространственного мышления, лежащими в основе простого суждения о локализации, эта область не является унитарной. Люди сильно различаются как по пространственным способностям (Wolbers & Hegarty, 2010), так и по предпочитаемым стилям пространственного мышления (Pazzaglia & De Beni, 2001).
В классической серии исследований Hegarty и Waller (2004, 2005) продемонстрировали существование по крайней мере двух раздельных навыков, проявляющихся при ментальных пространственных преобразованиях:
- Умственное вращение (mental rotation): выполнение пространственного преобразования объекта в фиксированной, эгоцентрической системе отсчета.
- Принятие перспективы (perspectivetaking): смена своей системы отсчета, чтобы она соответствовала системе отсчета второго объекта.
Hegarty и Waller (2004) показали, что эти навыки различны, и производительность в ряде задач, требующих этих навыков, лучше всего описывается двухфакторным решением (см. Moraresku & Vlcek, 2020 для обзора). Хотя корреляция между двумя факторами была в целом высокой (примерно 0.8), существуют и конвергентные нейронные данные, подтверждающие их функциональное разделение (Zacks et al., 2003).
Эгоцентрическая и аллоцентрическая системы отсчета
И принятие перспективы, и умственное вращение задействованы при интерпретации дисплеев пеленга во времени. Рассмотрим простейший случай, когда собственное судно (и, следовательно, консоль оператора) находится в статичном положении и ориентировано строго на север, а оператор должен лишь локализовать одну цель с постоянной скоростью. Согласно влиятельной таксономии Newcombe и коллег (Newcombe & Shipley, 2015; Uttal et al., 2013), это, вероятно, будет внутренняя-динамическая задача (intrinsic-dynamic task). Оператору требуется мысленно определить положение объекта в эгоцентрическом пространстве, используя представление (дисплей пеленга во времени), которое в значительной степени совпадает с его собственным («верх» = «впереди», «лево» = «лево» и т. д.). Эта задача в основном опирается на навыки умственного вращения, поскольку требует расчета и отслеживания положения (на основе информации об изменении пеленга) второго объекта (цели) в фиксированной или статической и в значительной степени эгоцентрической системе отсчета. В этой системе отслеживаемое судно будет казаться вращающимся и перемещающимся.
Однако задача оператора сонара осложняется двумя факторами:
- Собственное судно, вероятно, движется в направлении, отличном от строго северного, что приводит к несоответствию между системой отсчета собственного судна и дисплеем.
- Ориентация консоли (и, следовательно, дисплея) может не совпадать с направлением движения собственного судна, что приводит к дальнейшему систематическому несоответствию.
Эти факторы требуют использования навыков принятия перспективы, а не чистого умственного вращения, поскольку они включают изменение личной системы отсчета оператора. В рамках системы Uttal et al. (2013) это была бы внешняя-динамическая задача (extrinsic-dynamic task).
Сценарий, изображенный на Рис. 1a, является простейшим: курс собственного судна (обозначенный пунктирной синей линией) составляет 0°, что пространственно совпадает с системой отсчета самого графика. Однако в нашем эксперименте курс собственного судна выбирался случайным образом для каждого испытания, поэтому пунктирная синяя линия могла появляться под любым углом. Мы предполагали, что этот фактор, в сочетании с движением целевого судна, создаст трудности для участников.
Пространственное положение часто кодируется относительно собственного пространственного положения и ориентации (Kessler & Thomson, 2010). Угловая ошибка увеличивается с отклонением между текущим направлением взгляда участника и воображаемой ориентацией (Gardner et al., 2013).
Дополнительные факторы и упрощение задачи
Хотя перевод собственной перспективы является когнитивно сложной задачей, важно кратко отметить, что это далеко не единственные осложнения, с которыми приходится сталкиваться навигатору. В реальных условиях к ним относятся:
- Множественные цели.
- Заметный фоновый шум.
- Динамические цели.
- Необходимость интеграции данных сонара с другими источниками и/или анализами.
Более того, цель может активно пытаться замаскировать свой сигнал, и нет никаких гарантий, что контакт (или собственное судно) будет поддерживать постоянное направление или скорость; фактически, частое изменение курса иногда рекомендуется как способ различения информации, полученной методом формирования луча (beamforming) (Nardone & Aidala, 2007).
Эти реалии были слишком сложны для наших новичков. Чтобы сделать задачу доступной для них, мы позволили курсу собственного судна варьироваться только между испытаниями (а не внутри одного испытания), а одиночной отображаемой цели — быть либо (i) статической, либо (ii) движущейся с постоянной скоростью. Мы показывали только одну цель за испытание и не включали ложных срабатываний в дисплей.
Поскольку пространственные навыки заметно различаются у людей, мы также стремились изучить различия в существующих способностях (используя стандартный, простой тест пространственных способностей; Peters et al., 1995). Как и ожидалось, даже этот упрощенный сценарий оказался сложным для большинства.
Виртуальный, конформный, эгоцентрический дисплей пеленга во времени
Основная трудность интерпретации этих дисплеев заключается в сопоставлении аллоцентрического дисплея пеленга во времени с эгоцентрической системой отсчета. Концептуально схожая проблема возникала у авиаторов, которые ранее пытались посадить свои самолеты, используя дисплеи, не ориентированные на их собственную перспективу (Prevett, 1994), до тех пор, пока не были введены дисплеи, ориентированные на перспективу (или эгоцентрические), которые показали свое превосходство во время финального захода на посадку (Wickens & Prevett, 1995).
Однако в целом, перспективы, не центрированные на пользователе (экзоцентрические), сохраняют некоторые преимущества перед эгоцентрическими дисплеями, когда цель пользователя — понять пространство (Thomas & Wickens, 1999), а не перемещаться в нем. Эти типы навигации, вероятно, являются отдельными навыками с различной активностью мозга (van Asselen et al., 2006) и связанными с ними когнитивными профилями (Sanders et al., 2008).
Недавние инновации в области нательных дисплеев (head-mounted displays) и оптических сквозных методов визуализации позволили создать новые интеграции эгоцентрических и аллоцентрических пространственных представлений, например, использование виртуальных проекций для «видения сквозь» стены (Xu et al., 2023). Настоящая работа продолжает эту тенденцию двойных форматов отображения, исследуя, могут ли полупрозрачные наложения в VR традиционных (аллоцентрических) данных пеленга во времени помочь новичкам в интерпретации традиционных дисплеев.
Конкретно, мы исследовали простейшее прямое преобразование широкополосного сонара в пространственные знания как доказательство концепции. Всем участникам сначала многократно показывали симулированный широкополосный дисплей сонара пеленга во времени, изображающий одиночную цель, и просили указать направление этой цели в VR-сцене. Это был «базовый» этап.
На втором этапе (обучение) половине участников (группа «поддерживаемых») было предоставлено дополнительное формат отображения. Это наложение содержало ту же информацию, что и стандартный дисплей пеленга во времени, но мы использовали VR, чтобы обернуть дисплей вокруг головы пользователя в виде полупрозрачного наложения, тем самым преобразуя плоский, аллоцентрический дисплей в одновременно представленный эгоцентрический, конформный дисплей, выровненный по курсу собственного судна.
VR особенно хорошо подходит для данного исследовательского вопроса, поскольку формат дисплея по своей сути эгоцентричен; его основное преимущество заключается в способности способствовать погружению, которое возникает из его потенциала поместить пользователя «в сцену» (с высокой степенью присутствия; Milgram & Kishino, 1994) и часто помогает в изучении пространственных данных (см. Abich et al., 2021 для обзора).
Мы предполагали, что представление информации в эгоцентрическом формате снизит или устранит когнитивную нагрузку, связанную с преобразованием традиционного дисплея пеленга во времени в эгоцентрическое ментальное представление, необходимое для выполнения ориентировочной (указывающей) реакции. Мы предположили, что это будет проявляться в более быстрых и точных ориентировочных реакциях при наличии VR-наложения по сравнению с соответствующей контрольной группой («неподдерживаемой»), которая проходила то же обучение только с традиционным дисплеем пеленга во времени.
Мы ожидали, что преимущество будет особенно заметно, когда традиционный дисплей будет существенно повернут относительно собственного направления участника, тем самым создавая высокую нагрузку на навыки принятия перспективы.
Производительность против обучения
Помимо вопроса о поддержке производительности, существует второй вопрос, касающийся приобретения навыков. VR использовался как для оценки (He et al., 2022), так и для обучения или реабилитации (Caglio et al., 2012; Faria et al., 2016; Masoumzadeh & Moussavi, 2020; Park, 2022) пространственного познания. Пространственные навыки, включая принятие перспективы, очень податливы к обучению (Uttal et al., 2013) и могут обобщаться за пределы узко обученных областей (Judd & Klingberg, 2021).
Ранние исследования демонстрировали, что обучение на VR-системе развивает навыки навигации у пожарных (Bliss et al., 1997) и военно-морских офицеров (Hays & Vincenzi, 2000; Tate et al., 1997). Существует обширная литература, показывающая полезность VR в обучении пространственным способностям в целом (Dunser et al., 2006; Abich et al., 2021).
В отношении навыков принятия перспективы система Tangibles for Augmenting Spatial Cognition (TASC; Chang et al., 2017) конкретно улучшила производительность в принятии перспективы по стандартизированным тестам. Таким образом, целенаправленное обучение с помощью VR-поддержки может улучшить навыки принятия перспективы, но нам неизвестны работы, исследующие наш более узкий вопрос: будет ли VR-эгоцентрический формат отображения помогать участникам в обучении интерпретации дисплея пеленга во времени.
Возможно, более актуальным вопросом является то, обеспечивал ли предоставленный инструмент подходящий уровень сложности для освоения базового навыка (т.е. помещал ли он участников в «зону ближайшего развития», Vygotsky & Cole, 1978). Предоставление конформной, эгоцентрической информации могло бы, в принципе, позволить людям легко формировать ментальные ассоциации между эгоцентрическим положением объекта и его положением на дисплее пеленга во времени. Ментальные ассоциации такого рода обычно формируются быстрее и надежнее, когда стимулы, которые должны быть связаны, представлены одновременно и в непосредственной пространственной близости (см. Boakes & Costa, 2014 для обзора).
Однако существуют и издержки предоставления слишком настойчивой поддержки при первоначальном обучении новому навыку; людям необходима «желательная сложность» для освоения нового навыка, и это может быть затруднено, если предлагаемая помощь снижает сложность задачи ниже критического уровня (Schmidt & Bjork, 1992; Wulf & Shea, 2002). Это различие иногда называют предоставлением «костыля» (crutch), когда положительные эффекты поддержки не сохраняются после ее удаления, в отличие от «строительных лесов» (scaffold), когда положительные эффекты сохраняются после удаления поддержки.
Проблемная зависимость от системы поддержки принятия решений подводника была отмечена в другом исследовании, посвященном интерпретации дисплеев пеленга во времени, хотя и с использованием другого инструмента для поддержки более сложных решений (Chen et al., 2017). Следовательно, мы стремились разработать наше VR-наложение таким образом, чтобы оно снижало сложность задачи локализации, но не до такой степени, чтобы такие суждения становились тривиальными.
В ходе пилотирования оказалось, что сложные задачи (те, где имело место несоответствие с текущим курсом и движущаяся цель) оставались сложными для новичков даже с дисплеем. Хотя казалось вероятным, что наложение улучшит производительность, когда оно присутствует, более строгий тест заключался в том, приведет ли это к улучшенной, поддержанной или ухудшенной производительности в последующем, неподдерживаемом этапе тестирования.
Такая чрезмерная зависимость не определяется только инструментом, решением и средой. Индивидуальные различия играют важную роль (Szalma & Taylor, 2011). Имея это в виду, мы внимательно изучили закономерности взаимодействия участников с VR-наложением, чтобы выявить признаки зарождающейся чрезмерной зависимости, непрерывно отслеживая детализированные поведенческие метрики и метрики отслеживания взгляда на протяжении всей задачи. Исследовательские анализы взгляда проводились для лучшего понимания распределения внимания участников во время задачи, поскольку оптимальное поведение взгляда было связано с улучшением производительности в других сложных навигационных областях (в авиации; см. Ziv, 2016 для обзора).
Методы
Участники
Сбор данных начался в октябре 2022 года и завершился в мае 2023 года. Было привлечено восемьдесят один участник: 30 женщин и 51 мужчина, средний возраст 21.60 года (SD = 6.05). 65 участников были включены в проанализированную выборку (см. Результаты). Участникам были заданы краткие вопросы об их опыте с играми в виртуальной реальности (один участник отказался отвечать). 37 участников сообщили, что часто играют в видеоигры (на любой платформе), а 43 — нет. Среднее время, проведенное в играх за последнюю неделю, составило 7.13 часа (среднее — 5.9 часа в неделю, включая тех, кто не играет). На вопрос о самой часто играемой игре за последнюю неделю 17 участников не смогли назвать название, 11 указали игры, преимущественно двухмерные (The Sims, Snake, Candy Crush, Stardew Valley), а все остальные сообщили о недавнем опыте с играми, включающими трехмерную навигацию.
Набор участников проводился в Университете Флиндерс с одобрения Комитета по этике исследований человека Университета Флиндерс (#20235641). Все участники сообщили о нормальном или скорректированном до нормального зрении. Участники были вознаграждены либо зачетными баллами, либо 20 долларами за один сеанс продолжительностью 1–1.5 часа.
Аппаратура
Эксперимент был разработан с использованием игрового движка Unity (версия 2021.3.10f1) и Unity Experiment Framework (Brookes et al., 2020). Участники использовали VR-шлем HTC Vive Pro Eye (частота обновления 90 Гц, разрешение 1440 × 1600 пикселей на глаз, поле зрения 110°, отслеживание 6 степеней свободы). Данные отслеживания глаз и головы собирались с помощью интегрированных датчиков VR-шлема (120 Гц с точностью 0.5–1.1°). Ручные ответы регистрировались с помощью кнопок указателя и основного триггера на контроллерах Vive («wand»), синхронизированных со шлемом. VR-очки были подключены к беспроводной системе сухих электродов DSI24 Wearable Sensing, которая использовалась для одновременной записи ЭЭГ (19 скальповых электродов, 300 Гц). Один контроллер Vive использовался для выполнения ориентировочных реакций.
Виртуальная среда
Участники помещались в симуляцию рубки подводной лодки, дизайн которой основывался на размерах и конструкции австралийских подводных лодок класса Collins (оценка проводилась по документальному фильму, заказанному национальной общественной телекомпанией). В виртуальной комнате находился ряд из трех больших консолей (каждая из двух виртуальных экранов) непосредственно перед участником, а остальное пространство было пустым. Виртуальный дисплей сонара пеленга во времени отображался на главном экране центральной консоли (Рис. 1a). При взгляде на консоль сонара участники были обращены в направлении «вперед» на подводной лодке. Виртуальная среда была размещена в игровом пространстве примерно 2.5 м × 4.5 м.
Стимулы
В симуляции рубка располагалась под виртуальным океаном, а одиночная внешняя цель (т.е. 3D-модель корабля на поверхности океана) находилась в начальной случайной точке по периметру круга радиусом 20 м вокруг рубки. Рубка подводной лодки находилась на перископной глубине (то есть сцена в игре была расположена непосредственно под поверхностью воды). Модель корабля, представляющая целевой контакт, была окрашена в серый цвет, и также отображалась вторая копия этой модели корабля. Эта копия цели была сдвинута по цвету до желтого и располагалась в точке, где целевой контакт находился за 20 секунд до момента ответа участника (для предоставления обратной связи по второму суждению, см. Процедура). Для испытаний, в которых цель сохраняла фиксированное положение, обе модели кораблей накладывались друг на друга.
Сцена рубки была организована таким образом, чтобы стены комнаты исчезали в момент, когда участник регистрировал свое суждение о местоположении. После этого стены исчезали, и участники могли визуально наблюдать фактическое местоположение цели (представленное серым кораблем) и ее предыдущее местоположение (желтым кораблем), а также два плавающих куба. Два плавающих куба представляли собой суждения участников о пеленгах для текущего и предыдущего положения корабля (соответственно, серый и желтый кубы). Участники видели проекцию в сцене текущего положения контроллера-указателя, и направление, на которое указывал контроллер, отображалось зеленым лучом, исходящим в текущем направлении ориентации.
Что касается дисплея пеленга во времени (и VR-конформного наложения), фактическое положение цели обновлялось на экране сонара со скоростью 4 Гц и отображалось светящейся зеленой линией на постоянно обновляющемся дисплее пеленга во времени (как показано на Рис. 1a, b). Пунктирная синяя линия на дисплее указывала текущее направление движения подводной лодки. Ось Y графика начиналась с нуля секунд (текущее время) вверху и простиралась на 30 секунд вниз до нижнего края. Горизонтальные отметки указывали каждые 10 секунд. На оси X отображались метки для каждого кардинального направления, а также числовые индикаторы соответствующего угла в градусах (0°, 90°, 180°, 270°). Полный исходный код доступен на OSF (см. Раздел «Доступность данных»).
Процедура
Участники давали информированное согласие, а затем проходили тест на умственное вращение на бумаге перед началом VR-задания. В частности, они выполняли Раздел A 24-пунктовой формы Revised Vandenburg & Kuse Mental Rotation Test (Peters et al., 1995). Тест проводился индивидуально в тихой комнате и без ограничения по времени. Затем участники получали инструкции с помощью устного сценария (доступен на OSF; см. Раздел «Доступность данных»). Инструкции сопровождались визуальной помощью, демонстрирующей изображение сцены игры и изображение дисплея пеленга во времени, аналогичное показанным на Рис. 1. Визуальные примеры использовались для объяснения того, как интерпретировать симулированные дисплеи сонара пеленга во времени, объясняя каждую ось и предлагая три демонстрационных вопроса для проверки понимания (например, «если корабль показан здесь на дисплее, пожалуйста, укажите, где этот корабль будет относительно вас?»). Этот процесс занимал 5–10 минут, в зависимости от количества уточняющих вопросов. Только после завершения этого этапа надевался шлем. Участники затем случайным образом распределялись либо в группу «поддерживаемых» (N = 41), либо в группу «неподдерживаемых» (N = 40), и эксперимент начинался.
Затем участникам надевали VR-шлем HTC Vive и EEG-гарнитуру DSI24. После начала симуляции участники привыкали к виртуальной рубке. Их просили перемещаться по пространству и найти удобное положение перед основной консолью сонара.
Симуляционное задание было разделено на три этапа: Базовый, Обучение и Тест. Все этапы состояли из 40 испытаний (хотя базовый этап включал дополнительные 10 пробных испытаний, описанных ниже). На каждом этапе участникам представлялись различные конфигурации курса подводной лодки, положения цели и скорости цели в каждом испытании. Каждое испытание начиналось с того, что участник смотрел на консоль в течение примерно 3 секунд. Испытание начиналось только тогда, когда они были ориентированы на консоль (что эквивалентно «взгляду вперед» в наших последующих анализах).
Затем дисплей пеленга во времени заполнялся одной целью (Рис. 1a). Половина испытаний были статическими, когда цель сохраняла постоянный пеленг на протяжении всего испытания. На этих испытаниях дисплей пеленга во времени выглядел как вертикальная линия (т.е. постоянный пеленг, меняющийся только во времени). Половина испытаний были динамическими, когда цель двигалась с постоянной скоростью. Обычно они генерировали волнообразный паттерн на дисплее пеленга во времени, как показано на Рис. 1a. Курс собственного судна указывался пунктирной синей линией и выбирался случайным образом для каждого испытания. Курс собственного судна, начальное положение цели и скорость цели могли меняться независимо друг от друга в каждом испытании.
Было два исключения из этих правил во время начальных 10 пробных испытаний. Пробные испытания начинались с более легких сценариев, где первые три испытания имели фиксированный курс собственного судна на 0°, а целевое судно было неподвижно. В течение десяти пробных испытаний эти ограничения постепенно ослаблялись, так что к десятому испытанию цели в каждом испытании были динамическими, а курс собственного судна выбирался случайным образом. Во время пробных испытаний участникам разрешалось просить помощи или разъяснений, но на практике это происходило нечасто.
Участников просили сделать два суждения за испытание. Мы попросили их сначала указать, где цель находилась 20 секунд назад, и зарегистрировать свой первый ответ (нажав кнопку на ручном контроллере, синхронизированном с VR-шлемом). Затем им нужно было переместить контроллер туда, где, по их мнению, находилась цель в данный момент, и нажать вторую кнопку на контроллере. Суждение о том, где судно находилось 20 секунд назад, облегчалось отметкой и сеткой на 20 секунд по вертикальной оси дисплея пеленга во времени (и, эквивалентно, на виртуальном наложении). Оба ответа должны были быть зарегистрированы в течение 15 секунд. Два испытания потребовались для определения способности участников интерпретировать обе оси (время и пеленг).
После регистрации обоих суждений обратная связь предоставлялась на этапах базового обучения и обучения (но не на этапе тестирования). Во время периода обратной связи стены подводной лодки становились прозрачными (см. Рис. 2). Это открывало фактическое положение цели (представленное серым кораблем) и ее предыдущее положение (желтым кораблем), а также два плавающих куба. Два плавающих куба представляли суждения участников о пеленгах для текущего и предыдущего положения корабля (соответственно, серый и желтый кубы). Во время статических испытаний иконки серого и желтого кораблей находились в одном положении (и был виден только один серый корабль). Когда участник давал правильный ответ, кубические иконки накладывались на иконки кораблей, но оба были видны. После регистрации ответа участникам давалось 4 секунды для просмотра обратной связи, прежде чем им нужно было вернуть взгляд на переднюю консоль, чтобы сигнализировать о готовности к следующему испытанию.
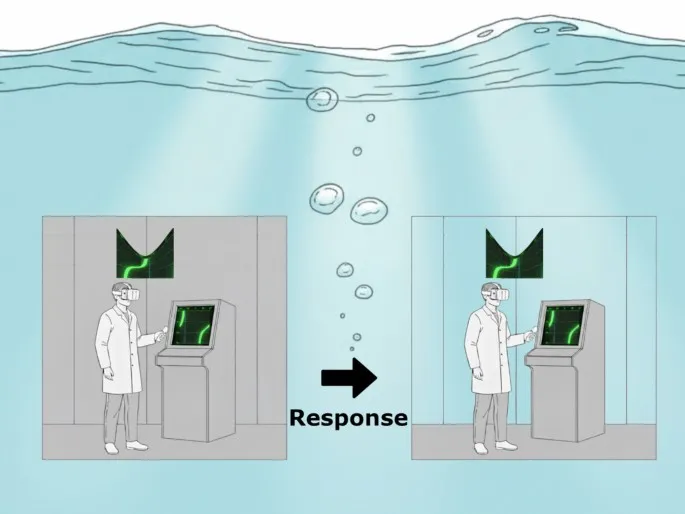
Рис. 2. Процедура. Обратите внимание: схема процедуры в каждом испытании этапа обучения для поддерживаемой группы. Участники начинали каждое испытание в виртуальной серой комнате с непрозрачными серыми стенами, а на консоли отображался дисплей пеленга во времени. Для участников поддерживаемой группы на этапе обучения был виден дополнительный дисплей в виде полупрозрачного наложения (он отсутствовал на этапах обучения и тестирования для поддерживаемой группы и никогда не присутствовал в неподдерживаемой группе). Он показан как изогнутый дисплей, парящий над головой. В виртуальном, конформном изображении тот же дисплей пеленга во времени переориентирован на перспективу пользователя и обернут вокруг его поля зрения, чуть выше линии взгляда. На всех остальных этапах участникам был доступен только дисплей пеленга во времени на консоли. После выполнения ответа стены становились прозрачными (как показано на изображении справа), и участник мог определить, дал ли он правильный ответ, ища серые/желтые иконки кораблей (см. Рис. 1D). Обратная связь не предоставлялась на финальном этапе тестирования для обеих групп.
Обучение продолжалось таким образом на всех трех этапах для неподдерживаемой группы, единственное отличие между этапами заключалось в том, что обратная связь не предоставлялась на финальном этапе тестирования. Для поддерживаемой группы на втором этапе (обучение) на каждом испытании отображалось полупрозрачное наложение (см. Рис. 1b). Этот полупрозрачный, конформный дисплей представлял дисплей пеленга во времени, преобразованный для отражения направления курса собственного судна и обернутый вокруг головы участников. Это означало, что информация о пеленге, отображаемая на традиционном дисплее пеленга во времени, теперь была эгоцентричной, а не аллоцентрической. Этот дисплей присутствовал только на этапе обучения и был удален для этапа тестирования. Во всех остальных аспектах обе группы рассматривались идентично.
Данные отслеживания взгляда и электрофизиологические ответы измерялись непрерывно на протяжении всей задачи. Чтобы сосредоточить наши анализы на периоде принятия решений, представленные здесь данные отслеживания взгляда собирались непрерывно между началом испытания и завершением ответа участника. Электрофизиологические ответы имели избыточные артефакты движения из-за скорости, поворотов и вращений, присущих задаче, поэтому они здесь не представлены. Следующие анализы ограничены поведенческими метриками и метриками отслеживания взгляда.
Анализ
Точность количественно определялась как непрерывная мера отклонения в градусах от правильной цели (1.0 = 0° разницы, 0.0 = 180° разницы). Задержки ответов измерялись с момента первоначального отображения данных на экране сонара. Точность и задержка первого и второго ориентировочных ответов за испытание были очень сильно коррелированы (r > 0.8), поэтому для всех анализов точности и задержки по первому и второму ответу усреднялись для получения средней точности и задержки на участника на испытание.
Были использованы две дополнительные меры для интерпретации положения руки и данных отслеживания взгляда.
- Первая количественно определяла время, проведенное в прямом взгляде. Этот «коэффициент прямого взгляда» (look forward ratio) измерял время каждого испытания, в течение которого положение глаз участника находилось в пределах 30 горизонтальных градусов (в любом направлении) от дисплея сонара пеленга во времени.
- Вторая количественно определяла время, проведенное в прямом взгляде на целевой контакт (с тем же допуском); «коэффициент взгляда на цель» (look target ratio). Два окна не были взаимоисключающими: если цель появлялась в переднем положении в данном испытании, два окна измерения взгляда (взгляд на цель и прямой взгляд) могли перекрываться. Поскольку продолжительность испытания варьировалась между и внутри субъектов (испытание завершалось после ответа), обе метрики были нормализованы по продолжительности испытания и, следовательно, выражены как доля от каждого испытания или «коэффициент».
Результаты
Все анализы контролировали уровень ошибки типа I на уровне 0.05 с помощью поправок Бонферрони, где это возможно. Для статистических выводов использовались частотные статистики (первичные тесты z, t, F и χ2). Байесовские факторы сообщались как свидетельство в пользу альтернативной гипотезы («BF10») и интерпретировались в соответствии с Джеффрисом (1961). Все анализы проводились с использованием JASP (2024) со стандартными настройками. Для линейных смешанных моделей мы использовали оценку степеней свободы Саттертуэйта. Оценка размера эффекта проводилась с использованием стандартных мер (ηP2, z Фишера, d Коэна) или доверительных интервалов, где это было возможно.
Определение обучающихся
Наш основной интерес заключался во влиянии конформной визуальной поддержки на способность людей выполнять задачу локализации и на их способность продолжать выполнять эту задачу при удалении дисплея. Чтобы проверить наш первый вопрос, мы оценили каждое испытание как правильное или неправильное (бинарность использовалась для упрощения сравнения с шансом; все последующие анализы проводились на непрерывных данных о точности). Каждый ответ был помечен как правильный, если оценка текущего положения цели находилась в пределах 30 горизонтальных градусов от ее истинного положения, и неправильный в противном случае. Мы приняли широкий диапазон значений как правильных (30°) при этом анализе, чтобы быть консервативными в отношении исключений. Участники, которые имели некоторое представление о местоположении цели, но могли быть неточными в своем представлении или исполнении, не соответствовали критериям исключения и, таким образом, были включены в наши анализы.
Затем для каждого отдельного участника проводился биномиальный тест (против базового уровня точности 50%), чтобы проверить, превышали ли их ответы по местоположению случайные. 65 из 81 участников превысили случайный уровень во время фазы обучения, и это распределение было обусловлено условием поддержки: 38/41 поддерживаемый участник превысил случайный уровень, в то время как только 27/40 неподдерживаемых участников превысили случайный уровень, χ2(1) = 8.10, p = 0.004. Аналогичный расчет был проведен для изучения того, оказал ли самоотчетный опыт регулярных игр какое-либо влияние на вероятность быть классифицированным как обучающийся. Предыдущий игровой опыт не оказал никакого обнаружимого влияния: 29 из 37 человек, регулярно играющих в игры, превысили среднюю производительность в нашей задаче, по сравнению с 35 из 43 неиграющих, χ2(1) = 0.01, p = 0.91.
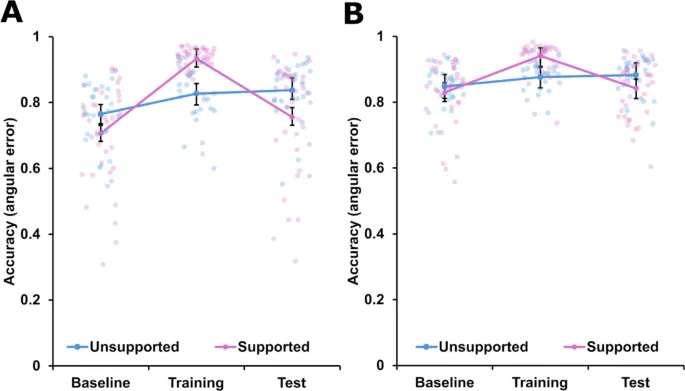
Таким образом, наша новая поддержка позволила большему количеству новичков успешно выполнить задачу, чем тем, кому не была предложена поддержка, независимо от их предыдущего опыта видеоигр. Все последующие анализы проводились на подгруппе обучающихся (38 поддерживаемых, 27 неподдерживаемых), которые смогли продемонстрировать некоторую способность выше случайной для данной задачи во время второй, обучающей фазы. Средняя производительность этих участников по всем этапам показана на Рис. 3.
Рис. 3. Точность указания по этапам и группам. Обратите внимание: средняя точность участников на протяжении эксперимента, разделенная по типу испытаний. Точность количественно определялась как непрерывная мера отклонения в градусах от правильной цели (1.0 = 0° разницы, 0.0 = 180° разницы). Панель A показывает испытания, в которых курс собственного судна и ориентация участника были несовпадающими (не смотрящими вперед), в то время как правая панель B показывает испытания, в которых они были выровнены (смотрящие вперед; см. Результаты для подробных расчетов). Ось Y индексирует точность, где 1 означает указательный ответ, отклоняющийся менее чем на 1° от целевого судна, а 0 — ошибку указания на 180°. Сплошные линии и заполненные иконки представляют средние значения групп на каждом графике, а вертикальные полосы ошибок указывают 95% доверительные интервалы. Полупрозрачные круги у каждой точки данных представляют среднюю производительность одного участника.
Точность указания и задержки
Средняя производительность обеих групп (поддерживаемая и неподдерживаемая) по каждому этапу (базовый, обучение, тест) показана на Рис. 3. Данные на уровне испытаний были введены в единую линейную смешанную модель с четырьмя фиксированными факторами: этап (базовый, обучение, тест), группа (поддерживаемая, неподдерживаемая), скорость цели (фиксированная, движущаяся) и курс (вперед, иначе). Также был введен случайный эффект пересечения для идентификатора участника.
Для курса мы разделили испытания на основе курса собственного судна. Если курс собственного судна находился в пределах 30° от севера, то перспектива участника примерно совпадала с дисплеем пеленга во времени (похоже на то, как рассчитывался коэффициент «прямого взгляда»). Ожидалось, что эти «прямые» испытания будут менее требовательными, чем другие испытания (обозначенные как «не прямые»). Случайный эффект участника позволил нам смоделировать межиндивидуальные различия в существующей способности и производительности.
Были обнаружены значимые основные эффекты этапа F(2, 8122.34) = 196.99, p < 0.001, ηP2 = 0.05, курса F(1, 8126.26) = 197.62, p < 0.001, ηP2 = 0.02, и скорости судна F(1, 8120.88) = 103.65, p < 0.001, ηP2 = 0.01. Основной эффект группы не был значительным, F(1, 63.68) = 0.05, p = 0.82, ηP2 < 0.001. Как показано на Рис. 3, участники в целом были более точны, когда они смотрели вперед, и обе группы имели тенденцию к более точной работе на последних двух этапах (обучение и тест), чем на базовом этапе. Участники были в целом более точны, когда цель была статической, чем динамической (сравнение не показано).
Наибольший интерес представляли эффекты, связанные с взаимодействием этапа и группы. Этап значимо взаимодействовал с группой, F(2,8122.34) = 95.46, p < 0.001, ηP2 = 0.02. Эффект этапа на различия между группами не участвовал в трехстороннем взаимодействии со скоростью судна, F(2, 8120.87) = 0.92, p = 0.41, ηP2 < 0.001, но он значимо взаимодействовал с курсом, F(2, 8125.99) = 11.72, p < 0.001, ηP2 = 0.002. Как видно на Рис. 3, общая закономерность сохранялась для обоих курсов (показанных индивидуально на левой и правой панелях), но различия между группами были более очевидны на непрямых испытаниях (левая панель).
Чтобы прояснить это взаимодействие, простые контрасты эффектов изучали влияние членства в группе (поддерживаемая, неподдерживаемая) на производительность во время каждого этапа, рассматриваемого в отдельности. Мы дополнительно разделили эти сравнения по курсу, получив в общей сложности шесть простых сравнений. Они проводились с использованием поправленных Бонферрони 95% доверительных интервалов с асимптотическими z-тестами (по стандартным настройкам JASP, т.е. степени свободы были большими и не оценивались).
На базовом этапе, до введения поддержки, не наблюдалось значимой разницы между группами ни по прямым, ни по другим испытаниям: средняя разница в точности между группами по прямым испытаниям составила 0.02 (что эквивалентно 4° разницы), 95% ДИ [−0.03, 0.06], z = 0.69, p = 0.99, а по другим испытаниям — 0.05 (или 9°), 95% ДИ [0.01, 0.10], z = 2.53, p = 0.07. Интерпретация последнего вывода осложнялась тем фактом, что доверительный интервал не пересекал 0 (что предполагает значимый эффект), но при соответствующей статистической коррекции он не соответствовал критерию 0.05. Чтобы помочь разрешить этот вывод, между группами (поддерживаемая против неподдерживаемой) на непрямых испытаниях на базовом этапе был проведен простой t-тест. Эффект не был значительным, при этом Байесовский фактор предполагал, что сравнение не дает никаких доказательств различий или их отсутствия, t(63) = 1.81, p = 0.08, d = 0.26, BF = 1.00.
На этапе обучения, когда присутствовала поддержка, поддерживаемая группа была значительно более точной, чем неподдерживаемая группа, на непрямых испытаниях на 0.11 (или 20°), 95% ДИ [0.07, 0.15], z = 5.13, p < 0.001, но не на прямых испытаниях (средняя разница = 0.06 или 10.8°), 95% ДИ [0.01, 0.10], z = 2.45, p = 0.09.
На этапе тестирования, когда поддержка была снята, неподдерживаемая группа была более точной на непрямых испытаниях на 0.08 (14.4°), 95% ДИ [0.04, 0.13], z = 3.92, p < 0.001, но не на прямых испытаниях (0.04, 7.4°), 95% ДИ [−0.01, 0.09], z = 1.76, p = 0.48.
Таким образом, поддерживаемая группа была более точной, чем неподдерживаемая, когда наложения присутствовали, но закономерность изменилась, когда эти наложения были сняты. Эти различия были наиболее очевидны, когда курс собственного судна и дисплей пеленга во времени не совпадали.
Анализ задержек ответа
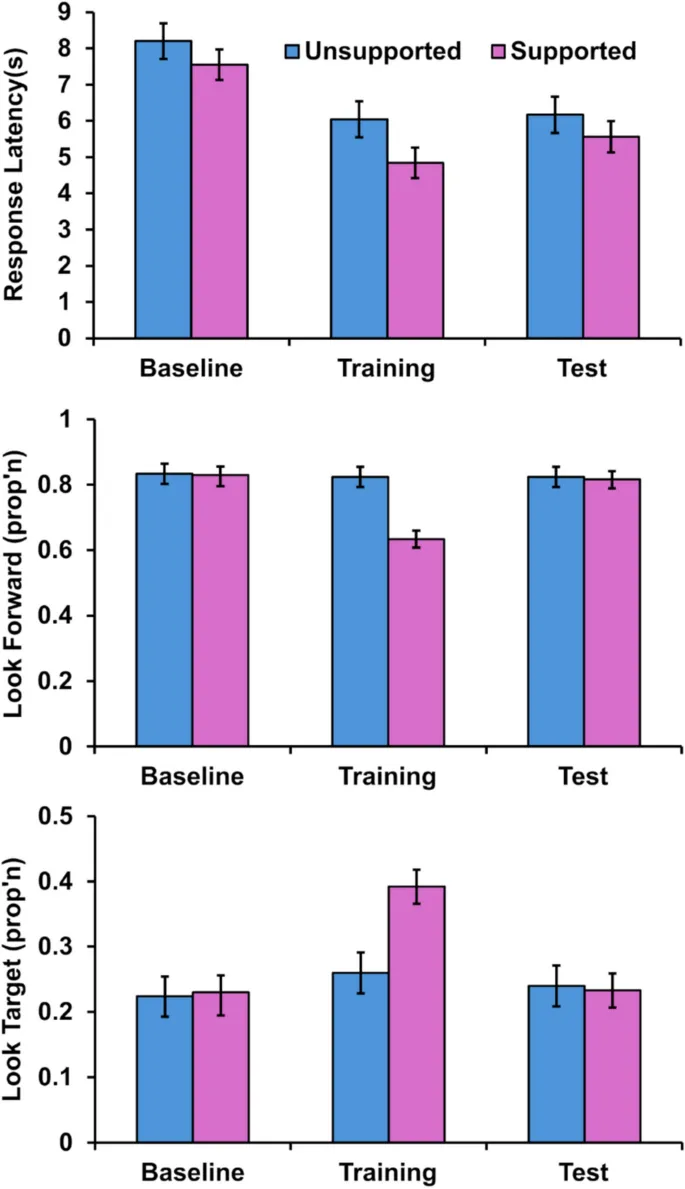
Тот же структурированный анализ использовался для анализа задержек ответа. Средние задержки ответа по группам и этапам показаны на верхней панели Рис. 3. В анализе обобщенных линейных смешанных моделей все четыре основных эффекта были значительными: этап, F(2,8121.78) = 572.63, p < 0.001, ηP2 = 0.12; группа, F(1,63.40) = 6.55, p = 0.01, ηP2 = 0.09; курс, F(1, 8125.00) = 58.05, p < 0.001, ηP2 = 0.007; и скорость судна, F(1, 8120.57) = 409.70, p < 0.001, ηP2 = 0.05. В целом, участники поддерживаемой группы реагировали быстрее (чем неподдерживаемая группа), участники увеличивали скорость ответа на протяжении этапов (они были самыми медленными на начальном базовом этапе), и люди реагировали быстрее, когда цель была статической, а их ориентация была близка к курсу собственного судна.
Снова, наш основной интерес заключался во взаимодействиях между этапом и группой. Двустороннее взаимодействие между этапом и группой было значительным, F(2, 8121.78) = 8.18, p < 0.001, ηP2 = 0.002, и это не было значимо модулировано трехсторонним взаимодействием со скоростью судна или курсом: скорость судна, F(2, 8120.56) = 0.42, p = 0.66, ηP2 < 0.001, и курс, F(2, 8124.01) = 0.33, p = 0.72, ηP2 < 0.001. Взаимодействие между этапом и группой было разложено на простые эффекты, изучающие влияние группы во время каждого этапа, когда он рассматривается в изоляции. Поправленные Бонферрони z-тесты использовались для анализа оценок контрастов.
На базовом этапе не наблюдалось значимой разницы между группами: средняя разница в задержке ответа составила 0.65 с (в пользу поддерживаемой группы), 95% ДИ [0.06, 1.30], z = 1.98, p = 0.14. На этапе обучения, когда присутствовала поддержка, поддерживаемая группа реагировала в среднем на 1.20 с быстрее, чем неподдерживаемая группа, 95% ДИ [0.54, 1.85], z = 3.58, p < 0.001. На финальном этапе тестирования, когда поддержка была снята, поддерживаемая группа реагировала в среднем на 0.60 с быстрее, но это не было значимой разницей, 95% ДИ [−0.05, 1.26], z = 1.81, p = 0.21.
Таким образом, поддерживаемая группа в целом реагировала быстрее, чем неподдерживаемая, но эта разница в основном приходилась на этап обучения, когда присутствовала поддержка (небольшая числовая разница на базовом этапе не прошла статистическую коррекцию для множественных сравнений).
Метрики отслеживания руки и взгляда
Проводились исследовательские анализы отслеживания взгляда. Каждая метрика взгляда анализировалась инференциально тем же образом, что и поведенческая точность и задержка ответа. Мы предположили, что всякий раз, когда участникам не предоставлялось визуальное наложение, им приходилось проводить больше времени, глядя на дисплей пеленга во времени, чтобы локализовать цель.
Сырые пропорции коэффициентов прямого взгляда сами по себе не имеют смысла. От участников требовалось возвращать взгляд к центральной консоли в конце каждого испытания, чтобы запустить следующее, поэтому, вероятно, любой индивидуальный коэффициент является завышенной оценкой времени, необходимого для изучения дисплея пеленга во времени. Тем не менее, изменение этого коэффициента между испытаниями и условиями является показательным, поскольку требование возвращать взгляд к консоли между испытаниями было одинаковым для всех этапов и условий.
Все основные эффекты были значительными: этап, F(2, 8335.18) = 299.15, p < 0.001, ηP2 = 0.07; группа, F(1, 63.53) = 11.45, p < 0.001, ηP2 = 0.15; курс, F(1, 8338.42) = 17.63, p < 0.001, ηP2 = 0.002; и скорость судна, F(1, 8334.40) = 12.40, p < 0.001, ηP2 = 0.002. Люди смотрели вперед немного больше, когда судно двигалось (статическое M = 0.79 против динамического M = 0.80), когда они не смотрели вперед (вперед M = 0.79 против иначе M = 0.80), если они были в неподдерживаемой группе и на двух этапах, когда наложение отсутствовало. Как видно на Рис. 4, последние два основного эффекта в основном связаны с тем, что люди смотрят вперед значительно меньше, когда наложение присутствует.
Рис. 4. Задержка ответа и коэффициенты взгляда. Обратите внимание: все панели показывают средние значения группы, разделенные по этапам (базовый, обучение, тест) и группе (неподдерживаемая, поддерживаемая). Верхняя панель показывает средние задержки ответа для указательных реакций (секунды). Средняя панель показывает среднюю долю времени принятия решения, которую участники провели, глядя в направлении традиционного дисплея пеленга во времени (коэффициент прямого взгляда). Нижняя панель показывает среднюю долю времени, которое люди провели, глядя в направлении цели перед ответом. Полосы ошибок обозначают 95% доверительные интервалы во всех панелях.
Эта интерпретация была подтверждена значительным взаимодействием между этапом и группой, F(2, 8335.18) = 261.50, p < 0.001, ηP2 = 0.06. Это двустороннее взаимодействие далее было модулировано скоростью судна, F(2, 8334.63) = 12.93, p < 0.001, ηP2 = 0.03, но не курсом, F(2, 8337.40) = 0.75, p = 0.47, ηP2 < 0.001. Чтобы прояснить эти взаимодействия, мы снова рассмотрели простой эффект группы на каждом этапе отдельно, но дополнительно протестировали влияние скорости судна на коэффициент прямого взгляда в поддерживаемой группе во время этапа обучения.
На этапах базового и тестового этапов не наблюдалось значимых различий между группами: базовый этап, 95% ДИ [−0.07, 0.09], z = 0.21, p = 1.00, и тест, 95% ДИ [−0.07, 0.10], z = 0.39, p = 1.00. Участники неподдерживаемой группы смотрели вперед больше, чем участники неподдерживаемой группы на этапе обучения, 95% ДИ [0.30, 0.46], z = 9.18, p < 0.001. При рассмотрении поддерживаемой группы отдельно на этапе обучения участники смотрели вперед больше во время статических испытаний (M = 0.66), чем динамических (M = 0.61), 95% ДИ [0.04, 0.07], z = 6.09, p < 0.001.
Таким образом, люди смотрели вперед с постоянной скоростью на каждом испытании (примерно от 0.7 до 0.8 времени взгляда), за исключением случаев, когда присутствовало наложение (снизилось примерно до 0.6). Люди, как правило, смотрели вперед на динамических испытаниях, предполагая тщательное изучение сложного дисплея пеленга во времени для локализации движущейся цели. Однако при наличии наложения наблюдалась противоположная закономерность: в среднем люди проводили меньше времени, глядя вперед, на динамических испытаниях.
Переходя к другой метрике взгляда, коэффициенту взгляда на цель, мы видим очень похожую картину. Люди имели тенденцию смотреть на цель с очень схожим коэффициентом во всех испытаниях, когда наложение отсутствовало (примерно 0.25), но в одном этапе/условии, где наложение присутствовало, это значение увеличивалось примерно на 0.40. Это неудивительно, потому что направление цели обычно представляет собой непримечательный участок внутренней стены подводной лодки при отсутствии наложения; только после выполнения ответа стена исчезает, и целевое судно обнаруживается. Когда наложение присутствует, на визуальном месте цели имеется полупрозрачная зеленая линия. Эти коэффициенты анализировались инференциально тем же образом. Были значимые основные эффекты этапа, F(2,8342.62) = 75.21, p < 0.001, ηP2 = 0.02; группы, F(1,67.37) = 10.20, p = 0.002, ηP2 = 0.13; курса, F(1,8365.67) = 22.76, p < 0.001, ηP2 = 0.002; и скорости судна, F(1,8337.24) = 36.69, p < 0.001, ηP2 = 0.004.
Этап значимо взаимодействовал с группой, F(2, 8342.62) = 35.92, p < 0.001, ηP2 = 0.008, но не было значимого трехстороннего взаимодействия со скоростью судна, F(2, 8338.99) = 1.02, p = 0.36, ηP2 < 0.001, ни с курсом, F(2, 8359.21) = 0.07, p = 0.94, ηP2 < 0.001. Как и прежде, три контраста простых эффектов изучали влияние группы в каждом этапе. Две группы не различались по своему коэффициенту взгляда на цель во время базового этапа, 95% ДИ [−0.04, 0.03], z = 0.37, p = 1.00, ни на этапе тестирования, 95% ДИ [−0.03, 0.04], z = 0.42, p = 1.00. На этапе обучения поддерживаемая группа смотрела на цель дольше во время периода принятия решений, 95% ДИ [0.10, 0.17], z = 7.58, p < 0.001.
Индивидуальные различия
Существуют заметные индивидуальные различия как в пространственных способностях, так и в том, как люди взаимодействуют с автоматизацией (Hegarty & Waller, 2004). С этой целью мы стремились проверить конкретные гипотезы относительно того, как эти два типа индивидуальных различий влияют на производительность.
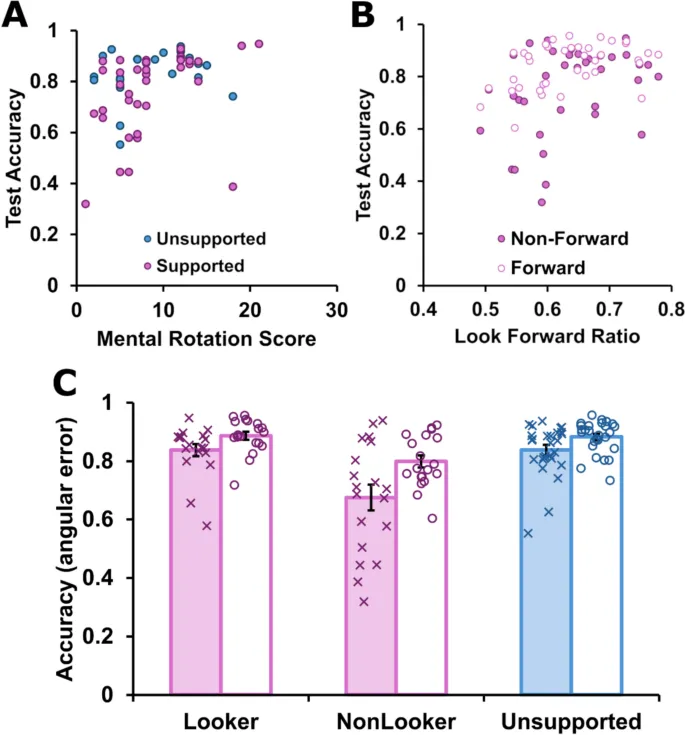
Во-первых, мы рассмотрели preexisting общие пространственные способности, протестированные с помощью теста на умственное вращение на бумаге (Peters, 1995). Была рассчитана простая двумерная корреляция между производительностью в тесте на умственное вращение и средней точностью на этапе тестирования на непрямых испытаниях, которые требуют смены перспективы (те, в которых ориентация участника не совпадала с курсом собственного судна). В целом, навык умственного вращения значимо предсказывал точность на этапе тестирования, r(63) = 0.32, p = 0.01, z = 0.33 (см. Рис. 5a). Если бы визуальное наложение было достаточно поддерживающим, чтобы снизить или устранить любую необходимость в preexisting пространственных способностях, то мы бы ожидали отсутствия такой связи между навыком умственного вращения и точностью, когда поддержка присутствовала. Согласуясь с этим прогнозом, корреляция между оценками умственного вращения людей в поддерживаемой группе и их точностью на сложных, непрямых испытаниях во время этапа обучения не была значительной: r(36) = 0.20, p = 0.23, z = 0.21.
Рис. 5. Индивидуальные различия в пространственных способностях, взгляде и точности на этапе тестирования. Обратите внимание: связи между способностью к умственному вращению, коэффициентом прямого взгляда и точностью ответа на этапе тестирования. Во всех панелях фиолетовые иконки и столбцы относятся к данным поддерживаемой группы, а синие — к данным неподдерживаемой группы. Панель A показывает корреляцию между общими баллами теста на умственное вращение и точностью на сложных, непрямых испытаниях на этапе тестирования. Каждая точка представляет среднюю производительность человека, с цветом, указывающим на членство в группе. Панель B показывает связь между прямым взглядом на этапе обучения (коэффициент прямого взгляда) и точностью на двух типах испытаний на этапе тестирования (прямые и непрямые). Обратите внимание, что каждый участник поддерживаемой группы представлен двумя точками на этом изображении. Панель C показывает среднюю производительность на этапе тестирования, разделенную по типу испытания (прямые в открытых столбцах и непрямые в заполненных столбцах). Поддерживаемая группа далее разделена на «зрителей» и «не-зрителей» в зависимости от степени, в которой они смотрели вперед на этапе обучения. Полосы ошибок обозначают стандартную ошибку среднего. Средняя производительность отдельных участников показана с наложенными иконками «X» и «O».
Второй анализ касался взаимодействия участников с дисплеем пеленга во времени. При операционализации того, что могло бы отличить людей, которые чрезмерно зависели от конформного сигнала, от тех, кто использовал этот сигнал для облегчения пространственного обучения, мы предположили, что те, кто стал зависимым, фактически игнорировали бы дисплей пеленга во времени и вместо этого полностью полагались бы на конформный сигнал. Напротив, те, кто использовал конформный сигнал для обучения интерпретации дисплея пеленга во времени, могли бы чередовать просмотр сигналов конформного дисплея и дисплея пеленга во времени в процессе выполнения реакции локализации. Такие поведенческие различия должны были бы проявляться в дифференциальных показателях нашего коэффициента прямого взгляда у тех, кому была предоставлена поддержка: те, кто игнорировал дисплей пеленга во времени, имели бы более низкие показатели, а те, кто использовал дисплей пеленга во времени в сочетании с помощью, имели бы более высокие показатели.
Мы обнаружили, что коэффициент прямого взгляда поддерживаемых участников на непрямых испытаниях во время обучения (когда присутствовал конформный дисплей) предсказывал последующую точность как на непрямых испытаниях, r(37) = 0.35, p = 0.03, z = 0.37, так и на прямых испытаниях, r(37) = 0.44, p = 0.005, z = 0.48.
Учитывая свидетельства чрезмерной зависимости в наших групповых анализах, мы далее изучили, демонстрировали ли все участники поддерживаемой группы такую чрезмерную зависимость на этапе тестирования. В частности, мы провели медианное разделение поддерживаемой группы на основе их коэффициента прямого взгляда во время обучения (т.е. степени, в которой они стремились использовать конформные сигналы для обучения, а также для производительности), и сравнили две подгруппы поддерживаемой группы («зрители» и «не-зрители») с неподдерживаемой группой на этапе тестирования. Согласуясь с нашими основными анализами, мы отдельно изучали производительность на прямых и непрямых испытаниях на этапе тестирования, что привело к ANOVA с 3 × 2 смешанными факторами, с фактором между группами (неподдерживаемая, зритель и не-зритель) и курсом на этапе тестирования (прямой, иначе).
Средняя производительность каждой группы (показана на Рис. 5) выявляет четкую закономерность. На этапе тестирования наблюдался основной эффект курса, при этом участники показывали более высокую точность на прямых испытаниях, F(1,62) = 38.87, p < 0.001, ηP2 = 0.39. Также наблюдался основной эффект группы, F(2,62) = 12.83, p < 0.001, ηP2 = 0.29. Два фактора значимо взаимодействовали, F(2,62) = 4.71, p = 0.01, ηP2 = 0.13. Простые последующие сравнения подтвердили, что «не-зрители» показывали значительно менее точные результаты, чем другие группы, на более сложных, непрямых испытаниях: по сравнению со «зрителями», t(36) = 3.41, p = 0.002, d = 1.11, BF = 20.95, или неподдерживаемыми участниками, t(44) = 3.92, p < 0.001, d = 1.17, BF = 83.37. Тот же закономерность наблюдалась и на прямых испытаниях: по сравнению со «зрителями», t(36) = 3.62, p < 0.001, d = 1.17, BF = 33.62, или неподдерживаемыми участниками, t(44) = 3.97, p < 0.001, d = 1.19, BF = 94.50. Сравнения между «зрителями» и неподдерживаемыми участниками не были значительными независимо от курса: прямые, t(44) = 0.23, p = 0.82, d = 0.7, BF = 0.30, и непрямые, t(44) = 0.01, p = 1.00, d = 0.00, BF = 0.30.
Таким образом, наблюдались свидетельства чрезмерной зависимости от наложения среди участников поддерживаемой группы, которые меньше смотрели на дисплей пеленга во времени (т.е. с низким коэффициентом «прямого взгляда»), что выражалось в более низкой точности по сравнению как с теми поддерживаемыми участниками, которые больше смотрели на дисплей пеленга во времени во время обучения, так и с теми, кто не имел доступа к наложению.
Индивидуальные различия в пространственной способности и вовлеченности
Один последний вопрос касался того, кто выигрывает от предоставления конформного дисплея. Возможно, те, кто обладает врожденной способностью к пространственному мышлению, являются теми, кто больше смотрит вперед при его отображении, и, следовательно, выигрывают от его наличия. Другими словами, возможно, тест на умственное вращение и наша метрика взгляда во время обучения являются лишь индикаторами одних и тех же людей; они не захватывают уникальную дисперсию. Чтобы проверить, вносят ли эти предикторы уникальный вклад в объяснение производительности на этапе тестирования поддерживаемой группы, мы провели линейную регрессию точности на этапе тестирования на непрямых испытаниях как по оценкам умственного вращения, так и по тенденции смотреть вперед во время обучения (на непрямых испытаниях). Модель объяснила значительную часть дисперсии в точности на этапе тестирования, F(2,33) = 4.94, p = 0.01, и было мало признаков коллинеарности между предикторами, VIF = 1.02. В этой модели оценка умственного вращения, b = 0.37, t = 2.18, p = 0.04, значимо и положительно ассоциировалась с производительностью по точности на этапе тестирования (оба коэффициента представлены в стандартизированной форме). Коэффициент прямого взгляда во время обучения не был значимым, b = 0.30, t = 1.94, p = 0.06, после учета умственного вращения.
Когда та же регрессия использовалась для проверки предикторов производительности на этапе тестирования на прямых испытаниях, предикторы были индивидуально значимыми (без признаков коллинеарности, VIF = 1.02): оценка умственного вращения, b = 0.35, t = 2.43, p = 0.02, и коэффициент прямого взгляда, b = 0.39, t = 2.68, p = 0.01.
Обсуждение
Мы предоставляем явные доказательства эффективности VR-визуального наложения в поддержке интерпретации дисплеев пеленга во времени у взрослых новичков. Наложение принимало аллоцентрическую информацию из традиционного дисплея пеленга во времени и отображало ее в выровненном, полупрозрачном, конформном виде, который участники могли использовать в дополнение к традиционному дисплею. Суждения были на 11° (более простые испытания) и 20° (более сложные испытания) точнее у участников, получивших наложение, по сравнению с теми, у кого его не было. Наличие наложения также приводило к более быстрым суждениям и, по-видимому, требовало меньше времени на инспекцию дисплея пеленга во времени (более низкие коэффициенты прямого взгляда).
К сожалению, положительного переноса на неподдерживаемый этап тестирования, по-видимому, не произошло. Поддерживаемая группа заметно показала худшие результаты на этапе тестирования. То есть, у них наблюдалось более резкое снижение скорости ответа и точности от этапа обучения к этапу тестирования по сравнению с неподдерживаемой группой, и они были значительно менее точны на испытаниях тестирования, чем неподдерживаемая группа. На наиболее сложных испытаниях (непрямых) это представляло собой реверсивное преимущество в 20° для поддерживаемой группы к преимуществу в 14° для неподдерживаемой группы. Не было никаких грубых изменений в ориентировочных метриках (прямой взгляд и взгляд на цель) и скорости ответа между группами на финальном этапе тестирования. Вместо этого основное различие, казалось, заключалось в снижении точности пространственных суждений у людей, которые ранее имели опыт работы с наложением.
Пространственные навыки и сложность задачи
Воздействие нашего манипулирования наложением было более очевидным на более сложных испытаниях. В среднем по всем группам и этапам люди работали значительно менее точно и значительно медленнее на испытаниях, где целевое судно двигалось (8° и 1.3 с) или когда курс их собственного судна не совпадал с дисплеем пеленга во времени (11° и 0.5 с). Мы рассмотрим каждое манипулирование в изоляции.
Во-первых, когда целевое судно двигалось, участники были вынуждены интерпретировать дисплей пеленга во времени, на котором контакт отображался как изогнутая линия с нелинейным горизонтальным движением. Участникам нужно было оценить, где находилось судно сейчас (интерпретируя верхнюю точку данных на дисплее) и где оно находилось 20 секунд назад (интерпретируя, где сигнал пересекал линию сетки на 20 секунд). В отличие от этого, на статичных испытаниях присутствовала одна почти вертикальная линия.
С точки зрения пространственного познания, статичные испытания можно рассматривать как внешнюю-статическую задачу (extrinsic-static task). Они требовали от участников относительно элементарного сдвига перспективы для сопоставления декартовой диаграммы (время по пеленгу) с собственной эгоцентрической перспективой (например, «верх» = «впереди»). Это преобразование немного сложнее для целей позади зрителя, поскольку «позади» отображается как «далеко слева» или «далеко справа», поскольку горизонтальная ось представляет вращение (рыскание), а не расстояние.
Напротив, динамические испытания представляли собой внешнюю-динамическую задачу (extrinsic-dynamic task) и создавали большую нагрузку на навыки умственного вращения. Участники могли сохранить свою перспективу и пространственную систему отсчета, но сопоставление горизонтального движения цели на дисплее пеленга во времени с эгоцентрическими пространственными координатами участников означало выполнение как минимум двух нелинейных преобразований (вращений вокруг вертикальной оси зрителя). Это было более сложное суждение, которое выполнялось медленнее и с большей ошибкой.
Однако наибольшее влияние на производительность людей оказал их собственный курс. Курс собственного судна выбирался случайным образом для каждого испытания и отображался как пунктирная синяя линия на дисплее пеленга во времени (и эквивалентно на наложении). Это манипулирование значимо взаимодействовало с этапом и группой, таким образом, что затраты и преимущества наложения были наиболее очевидны на испытаниях, когда ориентация участников не совпадала с дисплеем пеленга во времени. Хотя несоответствие курса не повлияло на широкую классификацию нашей задачи на основе навыков (она остается внешней-динамической или внешней-статической, в зависимости от скорости судна), оно изменило когнитивные требования к участнику.
Когда курс был заметно не совпал с графиком, участникам нужно было сначала сменить перспективу на перспективу пунктирной синей линии, прежде чем выполнять описанные выше преобразования (Рис. 2 показывает пример требуемого преобразования). Этот начальный сдвиг перспективы был только трансляцией (что должно быть проще, чем вращение, Michelon & Zacks, 2006). Однако в сочетании с необходимостью считывать декартову диаграмму как полярную, это фактически представляет собой и вращение перспективы.
Важно отметить, что эти два аспекта задачи, вероятно, взаимосвязаны. Мы рассматривали эти аспекты отдельно, отчасти для отражения существующих различий в литературе по пространственному познанию (Uttal et al., 2013; Hegatry & Waller, 2004) и отчасти для обеспечения статистического контроля и сохранения мощности. Тем не менее, анекдотично, именно испытания, где эти два фактора требовали интерпретации в сочетании, были отмечены как наиболее трудные для участников. Это усложнялось, если во время динамического испытания горизонтальное движение пересекало либо собственный курс, либо крайнее левое/правое положение графика, таким образом, переходя на другую сторону графика.
Такие разрывы остаются постоянной проблемой всякий раз, когда 360-градусная камера должна быть отображена на наборе панелей. Bell et al. (2025) недавно изучали, как наилучшим образом представлять 360-градусные изображения с перископа на серии дисплеев, и обнаружили, что выравнивание пользователя (аналогично курсу в данной задаче) влияло на производительность больше, чем введенные разрывы между панелями (см. также Michailovs et al., 2022, 2024). Однако это была статическая задача, в которой цели не перемещались боком через разрывы. Оптимальная визуальная организация в более динамичных условиях пока неизвестна.
Возможно, конформные VR/AR дисплеи, не имеющие таких разрывов (по крайней мере, в горизонтальном направлении), могут предложить дальнейшие улучшения по сравнению с существующими форматами дисплеев. К сожалению, наша способность количественно оценить влияние пересечения всех этих факторов была затруднена тем фактом, что наши испытания случайным образом определяли курс собственного судна и скорость целевого судна, поэтому люди испытывали различное количество этих более сложных испытаний. Будущие исследования, сосредоточенные на изучении пересечения этих требований к пространственным навыкам и способности людей ориентироваться в разрывах дисплея, могли бы тщательно спланировать и контролировать курсы по каждому испытанию, чтобы напрямую решить эти вопросы.
При количественной оценке preexisting пространственных способностей мы использовали простой тест умственного вращения на бумаге. Наш эмпирический фокус был на дизайне, реализации и эффективности нового визуального пособия, поэтому мы искали простую, эвристическую меру preexisting способностей, чтобы ограничить любые различия между нашими участниками, которые были бы настолько велики, что заслонили бы нашу оценку эффективности наложения. Этот простой подход оказался плодотворным, поскольку он позволил нам проверить эффективность случайного распределения, изучая preexisting различия между нашими группами участников, и обеспечил простую проверку нашей задачи интерпретации пеленга во времени; если задача действительно требует общих пространственных способностей, то простой тест пространственных способностей должен предсказывать производительность (что и произошло).
Действительно, существуют данные о том, что различные пространственные способности сильно коррелируют друг с другом (Hegarty & Waller, 2004). Однако более нюансированный подход к количественной оценке пространственных способностей, вероятно, был бы более информативным. Различные аспекты нашей задачи концептуально нагружают различимые пространственные навыки (Kozhenikov & Hegarty, 2001), однако мы не смогли изучить эти узкие гипотезы из-за нашего упрощенного подхода к оценке preexisting способностей. Будущие исследования должны использовать стандартизированный тест для оценки навыков принятия перспективы (например, компьютерный тест пространственной ориентации; Friedman et al., 2020) и помнить, что люди различаются не только по пространственным навыкам, но и по предпочтительным пространственным форматам (Pazzaglia & De Beni, 2001). Пока эти различия не будут изучены, остается открытым вопрос о том, кто получит наибольшую выгоду от нашего наложения.
Оценка наложения
В целом, визуальное наложение оказалось полезным. Оно снизило когнитивную нагрузку, связанную с принятием перспективы, на участника, преобразовав дисплей пеленга во времени для согласования с перспективой пользователя. Аналогично, оно выполнило вычислительные операции вращения для горизонтального выравнивания информации о пеленге, чтобы отразить эгоцентрическую перспективу пользователя. По сути, оно сняло когнитивно трудоемкие аспекты пространственной интерпретации дисплея пеленга во времени, тем самым повысив точность суждений и снизив задержку ответа.
Возможно, самый строгий тест эффективности наложения заключается в том, изменяет ли он закономерность того, кто работает хорошо, и какие испытания являются сложными. Предположим, есть две задачи: поднять 100 кг или поднять 10 кг. При отсутствии какой-либо поддержки одна задача будет намного сложнее другой, и производительность по обеим задачам может быть предсказана preexisting способностью (силой). Однако, если мы предоставим участникам доступ к вилочному погрузчику, то обе взаимосвязи разрушатся; оба веса одинаково легко поднимать, и связь между силой и подъемной способностью будет устранена.
Применяя те же критерии к нашему наложению, мы видим в целом ту же закономерность. Базовая связь между простым тестом пространственных способностей (тест на умственное вращение на бумаге) и точностью в указательных суждениях больше не наблюдалась при наличии визуального наложения. Другими словами, когда наложение присутствовало, способность людей выполнять точные указательные суждения, казалось, больше не зависела от их preexisting пространственных навыков. Предоставление наложения также значительно снизило различия в точности ответов между сложными и легкими испытаниями, когда оно присутствовало. Чтобы подтвердить это, мы провели простой t-тест, сравнивая производительность поддерживаемой группы во время этапа обучения на прямых и непрямых испытаниях: он не был значительным, с анекдотичными свидетельствами эквивалентности, t(37) = 1.50, p = 0.14, d = 0.24, BF = 0.49. Наложение явно изменило то, как люди выполняли задачу.
К сожалению, наше наложение действовало скорее как «костыль», чем как «строительные леса» (по крайней мере, в целом). Наш замысел заключался в том, чтобы, сняв часть умственных преобразований, необходимых для интерпретации дисплея пеленга во времени, освободить когнитивные ресурсы для изучения отображения между декартовой репрезентацией информации о пеленге (координата x) и эгоцентрическим пеленгом (направление от человека наружу). Действительно, только когда присутствовало наложение, правильное направление визуально указывалось одновременно с консолью в течение периода принятия решений. Эта временная обусловленность, как известно, способствует формированию фундаментальных ментальных ассоциаций, часто считающихся основой высших когнитивных функций, включая пространственное мышление (Boakes & Costa, 2014).
Возвращаясь к метафоре подъема веса, мы стремились предложить что-то похожее на машину для помощи в подтягиваниях; вместо того, чтобы люди были вынуждены поднимать большой вес за один раз, мы стремились взять на себя часть этого веса, чтобы люди могли использовать доступные ресурсы для развития формы и, таким образом, наращивать потенциал. Мы не добились этой цели, поскольку наши данные более соответствуют чрезмерной зависимости от автоматизации и ее неправильному использованию (Parasuraman & Riley., 1997).
Наша вспомогательная система наложения описывалась и воспринималась как абсолютно точная и надежная, а задача, которую она была призвана поддерживать, сложна. Эти значения были выбраны для максимизации разницы между поддерживаемыми и неподдерживаемыми условиями, но они также являются важными определяющими факторами высоких уровней зависимости (Lee & See, 2004). Внезапное удаление наложения было разработано для проверки переноса навыков и, следовательно, оценки степени, в которой поддержка способствовала обучению (Schmidt & Bjork, 1992). Однако многократное представление очень надежного, полезного наложения перед лицом сложной задачи, вероятно, само по себе усиливало зависимость участников от этого наложения (вызывая «инерцию зависимости», Lee & Moray, 1994).
Если бы наше наложение продолжало оставаться доступным, этот высокий уровень зависимости мог бы представлять собой высокий, но соответствующий уровень зависимости. Хотя мы не заявляли, что удалим наложение, мы неоднократно просили участников использовать наложение для изучения интерпретации дисплеев пеленга во времени. Таким образом, выбор полного полагания на наложение можно рассматривать как форму самодовольства, вызванного автоматизацией (Prinzel et al., 2001, 2005), при которой оператор частично или полностью когнитивно отключается от текущей задачи. Количественная оценка вариабельности восприимчивости к этому явлению у разных людей хорошо изучена (Merritt et al., 2019; Parasuraman & Manzey, 2010; Prinzel et al., 2001, 2005).
Анализируя паттерны взгляда во время обучения, мы выявили участников, которые больше или меньше взаимодействовали с дисплеем пеленга во времени во время обучения (через их коэффициент прямого взгляда), и обнаружили, что участники, которые чаще просматривали дисплей пеленга во времени, демонстрировали лучшую передачу навыков на этап тестирования. Действительно, дальнейший анализ показал, что те участники поддерживаемой группы, которые сохраняли частый взгляд на дисплее пеленга во времени, пока помощь была доступна, показали такие же хорошие результаты на этапе тестирования, как и неподдерживаемая группа, когда помощь была снята. То есть, они не показали никаких признаков зависимости или вызванного самодовольства, но при этом выиграли от помощи, когда она была доступна.
Эта закономерность чрезмерной зависимости, проявляющаяся только у подгруппы участников, напоминает вывод Chen et al. (2017) в одном из наиболее близких к данной задаче исследований. В их задаче участникам поручалось интерпретировать дисплей пеленга во времени типа «водопад», аналогичный представленному исследованию. Однако в задаче Chen et al. (2017) участники должны были делать широкий спектр суждений об этих контактах, сообщать о рабочей нагрузке и отслеживать несколько контактов, представленных одновременно в детализированной 30-минутной симуляции подводной лодки. Некоторым участникам предоставлялись автоматизированные линии помощи для выявления поведения контактов (или «траекторий»), которые могли указывать на потенциального противника.
В их исследовании были обнаружены свидетельства того, что инструмент поддержки приводил к снижению производительности по стандартизированному показателю ситуационной осведомленности (Endsley, 1995), что указывает на самодовольство, в то время как одновременно измерялись преимущества в других релевантных для задачи суждениях (точка максимального сближения, суждения о классификации). Эти результаты были дополнительно осложнены различиями, наблюдаемыми при реализации задачи в виде межгруппового или внутригруппового эксперимента (например, суждения о точке максимального сближения не всегда были лучше с поддержкой). Очевидно, что расчет затрат и выгод от автоматизации и поддержки принятия решений при выполнении сложных, многогранных обязанностей является тонкой оценкой. Данные настоящего исследования вносят вклад в эту дискуссию, подчеркивая ценность детализированных поведенческих данных (положение взгляда) для выявления того, кто получит выгоду от поддержки устойчивым образом, а чьи достижения в производительности более хрупки.
Ограничения
Хотя настоящее исследование основывалось на реальных операционных обязанностях, оно отдавало предпочтение внутренней валидности перед внешней. Переход от когнитивной лаборатории к реальной обстановке является сложным и вряд ли будет достигнут в одном исследовании (см. Clarke et al., 2012 для обсуждения). Мы стремились к строгому экспериментальному контролю за счет реализма, поэтому данный эксперимент значительно отстает от реального тестирования нового прототипа поддержки принятия решений. Наши участники были новичками, и пространственные навыки могут быть заметно затронуты многими видами экспертизы (Calabrese & Marucci, 2006; Fernandez et al., 2011; Spence & Feng, 2010). Существенное, продолжительное обучение профессиональных подводников, вероятно, повлияет на эти навыки.
Хотя мы не смогли напрямую оценить подводников в этом проекте из-за ограничений в ресурсах, мы рассмотрели другой источник экспертизы, релевантной для пространственных и навигационных навыков: опыт видеоигр. Опыт видеоигр связан с превосходной пространственной и навигационной производительностью, особенно в тех играх, которые требуют трехмерной навигации как основного игрового элемента (Richardson & Collaer, 2011; Richardson et al., 2011; Yavuz et al., 2024).
Удивительно, но постоянные геймеры не были более склонны демонстрировать базовый уровень пространственной компетентности, необходимой для участия в нашей задаче, чем не-геймеры (см. «Определение обучающихся»). Второй пост-анализ показал, является ли более узкий опыт игр, ориентированных на навигационные требования (например, шутеры от первого лица, FPS), влиял на начальную производительность, указывая на preexisting преимущество для геймеров. Для этого мы далее разделили включенных участников на тех, кто указал игры FPS как свои предпочтительные игры (n = 23), и сравнили их со всеми остальными (n = 42), и изучили точность на базовом этапе. Значимых различий не наблюдалось, t(63) = 0.18, p = 0.86, что снова предполагает, что обширный опыт виртуальной пространственной навигации не оказал обнаружимого влияния на производительность в данной задаче.
Это, однако, не означает, что опытный подводник показал бы тот же уровень производительности, что и наши участники-новички. Представленная задача представляет собой далекий перенос (far transfer) всех игр, с которыми участники имели опыт, но является фундаментальной для сложных пространственных оценок, регулярно проводимых для подводников. Поэтому мы предполагаем, что обученные подводники не столкнулись бы с таким же уровнем трудностей при выполнении нашей упрощенной задачи, разработанной в первую очередь для новичков. Однако реалистичные подводные информационные среды более сложны, чем мы могли смоделировать для новичков, и поэтому, возможно, предоставляют больше возможностей для снижения посторонней нагрузки, связанной с пространственными преобразованиями, которые могут быть сняты или объединены посредством инноваций в пользовательском интерфейсе (Fay et al., 2019). Таким образом, вопрос о выгоде, предоставляемой конформными форматами отображения и информационными наложениями в целом, остается открытым.
Будущие исследования должны учитывать роль разделяемых форм пространственного познания в этих оценках и роль подлинной экспертизы в выполнении и управлении этой когнитивной нагрузкой.
Наконец, наше решение ограничить анализ участниками, которые продемонстрировали вышеслучайную производительность во время обучения, ввело альтернативное объяснение данных. Это решение было, по сути, прагматичным; мы могли исследовать обучение или производительность людей только тогда, когда мы были уверены, что они не просто угадывают, и у нас не было такой уверенности в тех людях, которые последовательно показывали случайные результаты.
Другим распространенным подходом к проблеме индивидуальных различий является продолжение обучения участников до тех пор, пока все не достигнут порогового уровня производительности. Однако это также создает дисбаланс, поскольку люди затем получают разный уровень обучения (и знакомства с задачей, и усталости). Тем не менее, наш выбор дизайна мог означать, что наличие наложения помогло некоторым участникам в поддерживаемой группе достичь уровня выше случайного реагирования, который, возможно, не был бы достигнут, если бы они вместо этого были отнесены к неподдерживаемой группе. Проще говоря, мы могли случайно выбрать preexisting пространственные способности в неподдерживаемой группе, но не в поддерживаемой. Если это так, то следует, что мы увидим большую производительность в неподдерживаемой группе на финальном этапе, когда поддержка и обратная связь были сняты. Такие различия на этапе тестирования поэтому могут рассматриваться как продукт отбора, а не чрезмерной зависимости: те, кто мог поднять вес только с помощью вилочного погрузчика, были включены в одну группу, но не в другую.
Маловероятно, что это объяснение будет достаточным для нынешних выводов. Если мы сравним preexisting навыки умственного вращения в поддерживаемой и неподдерживаемой группах, то нет никаких указаний на систематическое различие между группами, t(61) = 0.70, p = 0.94, d = 0.02. Во-вторых, мы использовали линейные смешанные модели, которые включали индивидуальные перехваты в наших основных анализах, таким образом контролируя часть дисперсии, относящейся к индивидуальным различиям в начальных уровнях навыков. В-третьих, мы напрямую изучили производительность на начальном базовом этапе между поддерживаемой и неподдерживаемой группами. Это сравнение не было значительным, но в равной степени было бы преждевременно интерпретировать это как убедительное доказательство эквивалентности между группами. Уточняющие байесовские анализы не дают заметных доказательств ни в пользу, ни против предложения о том, что они были одинаковыми или разными на базовом этапе. Это неоднозначное, слабое сравнение резко контрастирует с более крупными, более надежными значительными различиями, наблюдаемыми на двух других этапах, что предполагает, что preexisting различия сами по себе не могут объяснить гораздо большие последующие различия. Таким образом, мы рассматриваем этот случайный отбор как неполное и недостаточное объяснение влияния наложения на обучение или тестирование.
Заключение
Участники-новички выполняли суждения о локализации, используя упрощенные дисплеи пеленга во времени того же формата, что и у подводников. Это происходило в VR-симуляции, где половине участников предоставлялось дополнительное эгоцентрическое, конформное наложение. Предоставление этого дополнительного наложения улучшило скорость и точность суждений о локализации. Когда эта поддержка была снята, появились признаки чрезмерной зависимости от конформного дисплея, в том смысле, что бывшие участники, получавшие поддержку, показали худшие результаты, чем бывшие неподдерживаемые участники. Эта закономерность варьировалась у разных людей. Плохая производительность на этапе тестирования предсказывалась тем, как участники взаимодействовали с помощью, и preexisting навыками пространственного мышления (умственное вращение).
Такие наблюдения могут оказаться полезными при обучении и отборе подводников, а также при разработке метрик для поддержки безопасного (и не чрезмерно зависимого) будущего использования вспомогательных средств дополненной реальности для оперативных суждений.