Интересное сегодня



Влияние задержки обратной связи на неявное сенсомоторное обучение
Для повышения и поддержания точности движений люди вносят коррективы в последующие попытки на основе предыдущих ошибок. Такое обучение по попыткам происходит неосознанно и в основном изучалось с использованием движений дотягивания. Целенаправленные проекционные движения, такие как стрельба из лука, имеют внутреннюю задержку между отпусканием объекта и наблюдением результата (например, положение прибытия объекта), и эта задержка может предотвратить неявное обучение по попыткам.
Цель исследования
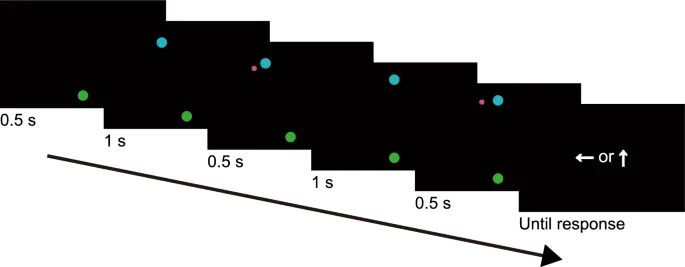
Целью нашего исследования было изучение обучения в проекционных движениях и влияния внутренней задержки. Во время эксперимента джойстик резко дергали, чтобы переместить курсор из начальной позиции к цели. Для манипуляции длиной задержки между отпусканием курсора и наблюдением результата изменялась скорость движения курсора: высокая скорость могла привести к короткой задержке.
Результаты исследования
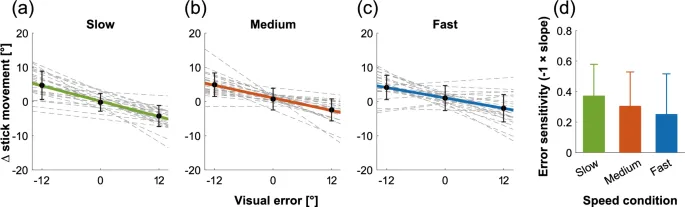
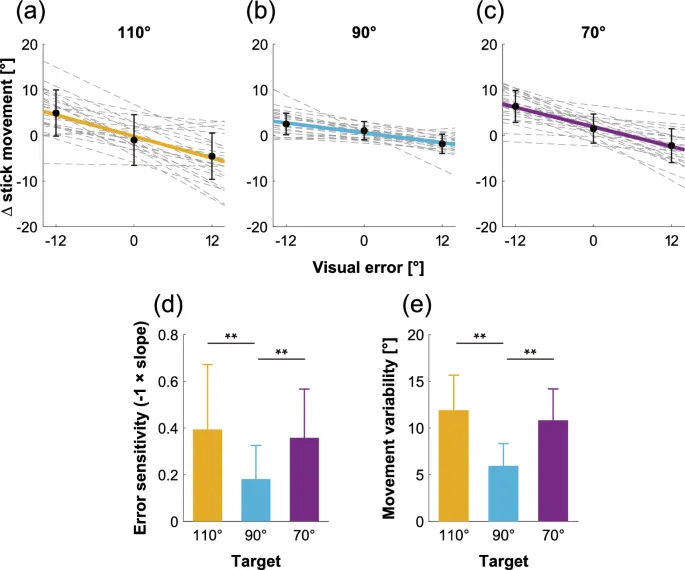
Мы обнаружили неявное обучение по попыткам при всех условиях скорости, и чувствительность к ошибкам не значительно различалась между условиями скорости. Кроме того, чувствительность к ошибкам зависела от местоположения цели, то есть от направления движения. Результаты указывают на то, что неявное обучение по попыткам происходило в целенаправленных проекционных движениях, несмотря на длину внутренней задержки. Кроме того, степень этого обучения зависела от направления движения.
Неявное обучение и целенаправленные проекционные движения
Баллистическое движение, направленное на визуальный объект, достигается с помощью предварительного контроля. Поскольку состояния тела и окружающей среды постоянно изменяются, мы корректируем движение на основе воспринимаемой ошибки, чтобы повысить и поддерживать точность. Например, в последовательном выполнении метания дротиков или штрафных бросков в баскетболе точность улучшается с увеличением числа попыток; предполагается, что сенсомоторное обучение по попыткам улучшает точность.
Методы исследования
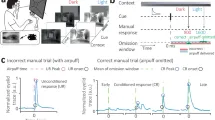
Обучение по попыткам может быть как добровольным, так и недобровольным. Этот неявный процесс часто изучался с использованием визуальной обратной связи с фиксацией ошибок. В задачах дотягивания с фиксацией обратной связи курсор следует за фиксированной траекторией независимо от движений руки. Таким образом, этот парадигм может заставить участников испытать фиксированную визуальную ошибку. В последующей попытке после показа ошибки движения дотягивания участников смещаются, чтобы противодействовать ошибке, не относящейся к задаче, даже если они получают объяснение визуальной фиксации ошибок и инструкцию игнорировать фиксацию и дотягиваться до цели напрямую.
Особенности движений и принятие решений
Исследования обучения по попыткам обычно использовали движения дотягивания. В спорте, однако, часто возникают возможности перемещать объект, выполняя баллистическое движение, такое как метание дротиков, штрафные броски в баскетболе и стрельба из лука. Тем не менее, существует ограниченное количество данных о сенсомоторном обучении по попыткам в дискретной задаче проецирования объекта к цели. Кроме того, насколько нам известно, ни одно исследование специально не фокусировалось на неявном процессе. Таким образом, остается неясным, происходит ли неявное обучение по попыткам во время баллистических движений для создания целенаправленного движения объектов, что в этом исследовании называется целенаправленным проекционным движением.
Заключение
В целенаправленной проекционной задаче мы наблюдали неявное обучение по попыткам на основе визуальной обратной связи при всех условиях скорости. Эти результаты не соответствуют данным предыдущих исследований, хотя их проекционная задача не измеряла исключительно обучение по попыткам в отношении неявного процесса. Наша задача отличается от их задачи несколькими аспектами, и эти различия могут объяснить несоответствие результатов. Одно из таких различий заключается в том, был ли курсор обратной связи закреплен, когда его смещение достигло 15 см, что является расстоянием между начальным местоположением и целью. В предыдущей задаче курсор проходил через эту точку без фиксации, тогда как в настоящей задаче он был закреплен с учетом быстрого движения курсора в условии высокой скорости.
Мы предполагаем, что местоположение и количество целей могут модулировать влияние визуальной обратной связи на сенсомоторное обучение. Цель представлялась из начального местоположения только под углом 90° в предыдущем исследовании и под углами 70°, 90° и 110° в нашем исследовании. Наш эксплуатационный анализ установил значимое, но умеренное обучение по попыткам под углом 90°. Кроме того, поскольку в каждом испытании нашей задачи было три возможных местоположения для цели, были промежутки, где движение джойстика не выполнялось для конкретной цели в течение до 15 последовательных испытаний (обратите внимание, что в испытаниях непосредственно перед и после испытания с искажением местоположение цели было таким же, как и в испытании с искажением). Согласно байесовскому взгляду на сенсомоторное обучение, эти промежутки могли бы увеличить неопределенность априорной информации (то есть прогнозирование сенсорной обратной связи: прямая модель), увеличивая взвешивание вероятности (то есть визуальная обратная связь).





