Интересное сегодня
Тестовая статья о психологии 15ebe97a
Это тело тестовой статьи. Она содержит полезные размышления и советы. Секция 1...
Агентные нулевые модели для анализа социальных взаимодействи...
Введение в анализ социальных взаимодействий Социальное взаимодействие является движущей силой в форм...
Групповое пение и йога при болезни Паркинсона: влияние на эм...
Введение Люди с нейродегенеративными заболеваниями, такими как болезнь Паркинсона (БП), часто сталки...
Влияние дополненной реальности на меткость бросков в дартс
Введение Сенсорное восприятие движения окружающего мира и его объектов является основополагающей зад...
Как вовлеченность влияет на принятие решений шахтерами в усл...
Статистика показывает, что небезопасное поведение шахтеров является основной причиной аварий в уголь...
Почему леворукость у принцесс Диснея имеет значение: анализ ...
Введение: феномен леворукости в современном мире По статистическим данным, собранным в текущем десят...



Введение в моторный контроль и восприятие глубины
С точки зрения моторного контроля, движения ручного слежения включают как обратную связь, так и упреждающее управление. Степень, в которой мозг полагается на упреждающий контроль для успешного выполнения задачи, зависит от нескольких факторов, включая возраст, нарушения, ускорение цели и скорость цели, с вовлечением субдвижений или прерывистости. В отличие от достигающих движений, которые, вероятно, осуществляются за счет первоначального упреждающего контроля с переходом к контролю по обратной связи при приближении к цели, задачи визуального слежения требуют постоянной обработки пространственной информации с involvement визуальной обратной связи.
Кроме того, многие задачи ручного слежения выполнялись в двумерном пространстве. Те, что выполнялись в трехмерном (3D) пространстве, не фокусировались на эффекте глубины, так как требуемая траектория была несколько усложнена. Однако информация о глубине цели должна быть исследована, чтобы понять, как мозг планирует и генерирует моторные команды для выполнения движений слежения, поскольку восприятие глубины требует сложных вычислений в мозге. Другими словами, степень, в которой информация о глубине способствует выполнению движения ручного слежения в 3D-пространстве, еще предстоит выяснить.
Нейробиологические основы восприятия глубины
Восприятие глубины связано со значительной обработкой информации в мозге. При бинокулярном зрении бинокулярный параллакс (binocular disparity) считается важным фактором в восприятии глубины; следовательно, было предложено несколько моделей, объясняющих, как мозг может использовать эту информацию. Бинокулярное зрение также связано с бинокулярным слиянием (binocular fusion), которое может влиять на восприятие глубины. Такая информация доступна только при бинокулярном зрении и может давать преимущества в моторном контроле.
Соответствующая мозговая активность также была зарегистрирована, включая активность в дорсальном пути (dorsal pathway) для восприятия глубины путем слияния относительного движения и бинокулярного параллакса, нейронную активность, связанную с глубиной на основе параллакса движения (motion parallax), и активность мозга в задней теменной коре (posterior parietal cortex) и дорсальном потоке (dorsal stream), связанную с кинетическим эффектом глубины (kinetic depth effect). Модели, объясняющие восприятие глубины при монокулярном зрении, также были предложены. Поскольку восприятие глубины зависит от различных типов доступной информации, важно исследовать, как эта информация действует на уровне производительности.
Методология исследования
Таким образом, мы сосредоточились на эффекте информации о глубине в задаче визуального слежения, которая может быть полезна для обучения сложным моторным навыкам, особенно в 3D пространстве виртуальной реальности (VR). 3D-взаимодействия проводились в ситуациях, реализованных с помощью различных систем, включая инфракрасную визуализацию, дополненную реальность и планшетные персональные компьютеры. Мы adopted среду VR, чтобы создать ситуацию с целью, которая пространственно соответствовала координатам реального мира для реалистичного опыта.
В пространстве VR визуальная цель полностью находится под нашим контролем, что позволяет трассировщику перекрывать цель, в отличие от реального мира, где построение среды требует физического объекта, движущегося по кругу с постоянной скоростью. Если информация о глубине влияет на производительность слежения сложным образом, это следует учитывать при разработке программ тренировок для облегчения моторных навыков с помощью задач визуального слежения в 3D VR-пространстве.
Участники и экспериментальная установка
В эксперименте приняли участие пятнадцать мужчин. Их средний возраст и стандартное отклонение (SD) составили 20.1 и 0.6 соответственно. Двое участников были левшами, остальные — правшами. Все участники предоставили письменное информированное согласие до эксперимента. Исследование было одобрено Институциональным наблюдательным советом Национального института технологий, колледжа Гумма, и проведено в соответствии с Хельсинкской декларацией.
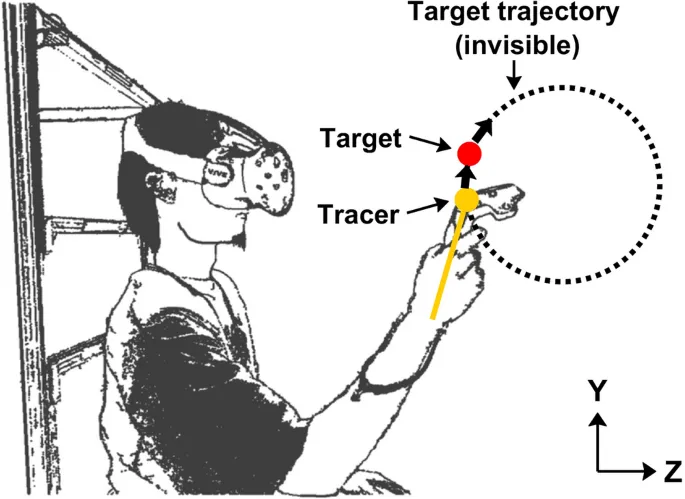
В эксперименте участников просили выполнить задачу визуального слежения с помощью HTC VIVE (HTC Corporation, Тайбэй, Тайвань) в immersive 3D VR-пространстве, которое было реализовано с помощью программного обеспечения Unity (Unity Technologies, Сан-Франциско, Калифорния, США). Во время эксперимента участники носили HMD (head-mounted display — шлем виртуальной реальности) VIVE с частотой обновления 90 Гц, который использовался для объектов в пространстве VR. HMD предлагал поле зрения 110 градусов с разрешением 2880 × 1600 пикселей.
Дизайн задач и процедура
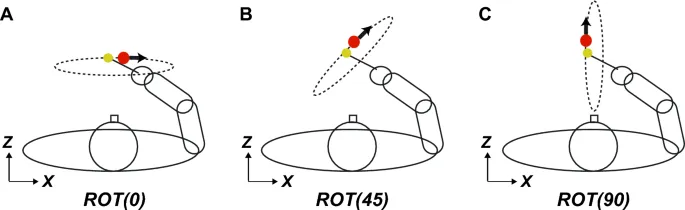
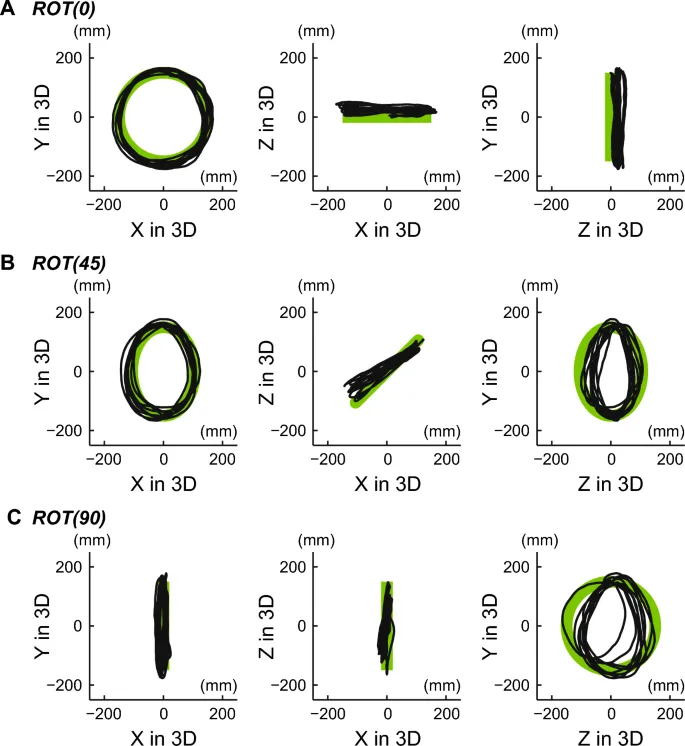
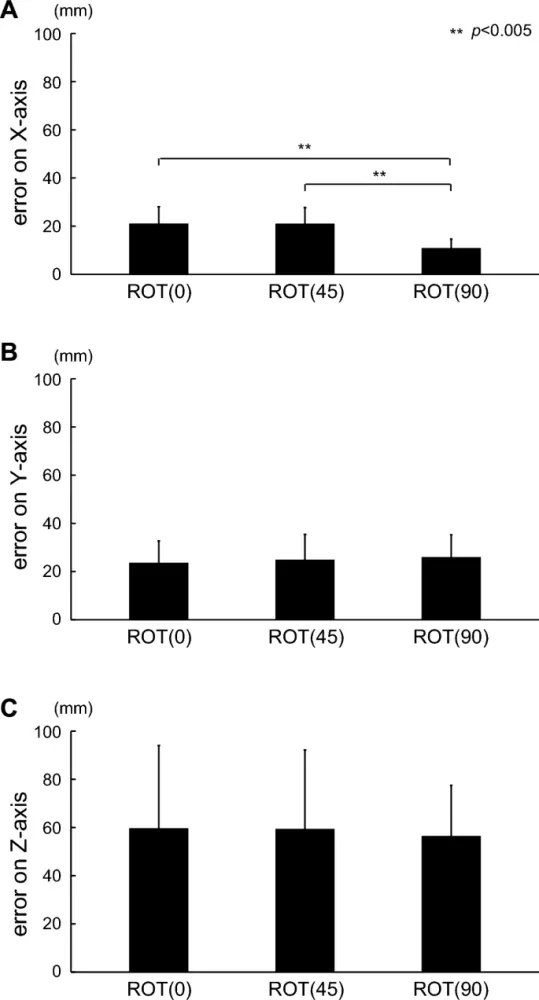
Мы designed эксперимент для исследования механизма моторного контроля во время задачи слежения в 3D VR-пространстве. Эксперимент включал три типа задач с разными плоскостями глубины: ROT (0), при котором цель представлялась движущейся по кругу на фронтапараллельной плоскости (frontoparallel plane); ROT (45), при котором цель двигалась по кругу на плоскости, повернутой на 45° относительно сагиттальной плоскости (sagittal plane); и ROT (90), при котором цель двигалась по кругу на сагиттальной плоскости.
Другими словами, задача ROT (0) требовала латеральных и вертикальных движений, тогда как задача ROT (90) требовала вертикальных и глубинных движений. Напротив, ROT (45) требовал одновременных латеральных, вертикальных и глубинных движений. Кроме того, этот эксперимент включал два условия зрения: условие бинокулярного зрения, при котором участники выполняли задачи без каких-либо препятствий для зрения, и условие монокулярного зрения, при котором участники выполняли задачи с закрытой одной стороной зрения.
Результаты исследования
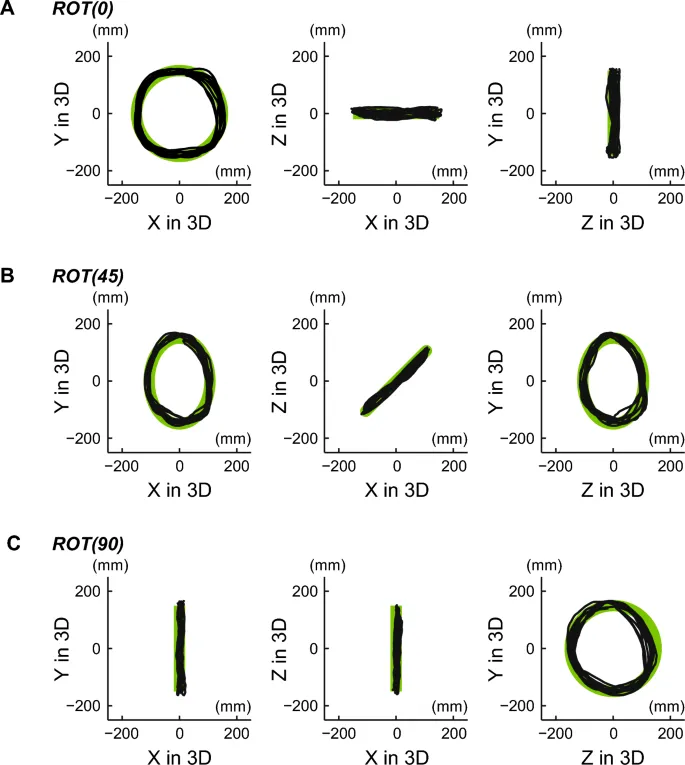
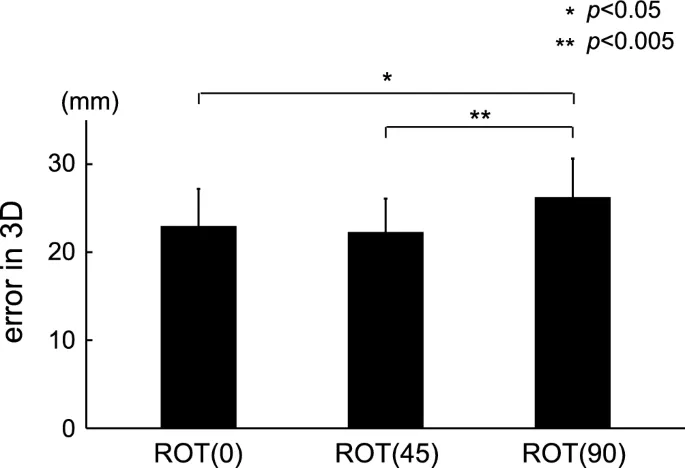
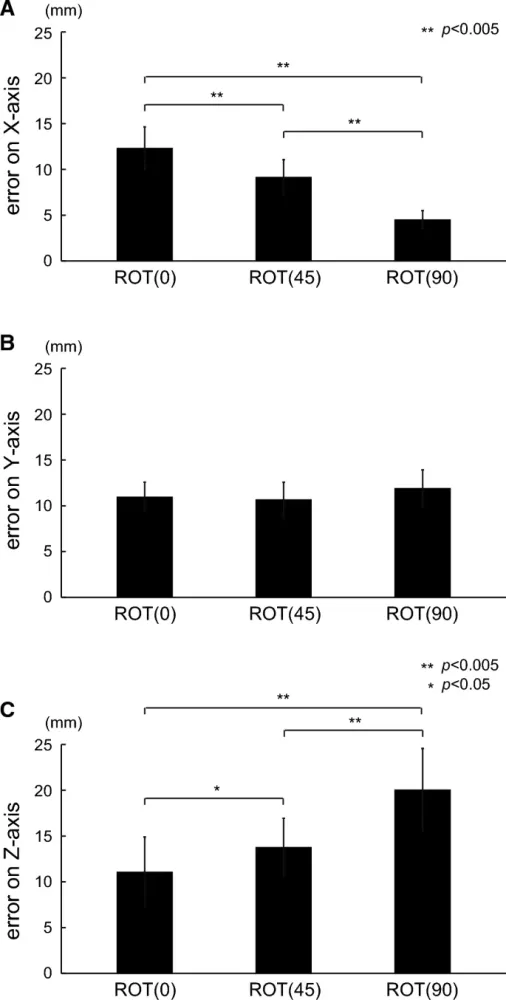
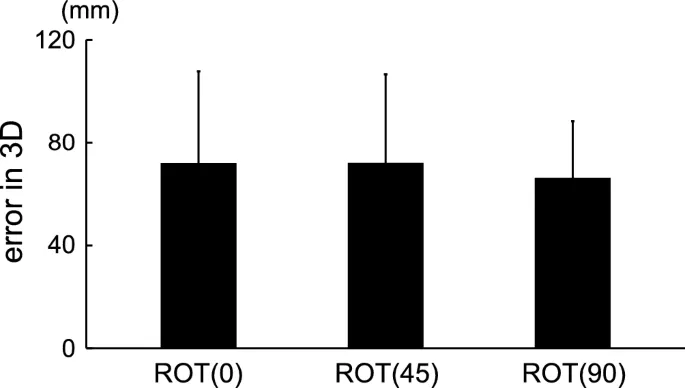
При бинокулярном зрении задача ROT (90), которая требовала наибольшего движения по глубине среди задач, показала наибольшую ошибку в 3D. Аналогично, ошибки (отклонение от пути цели) на оси глубины выявили значительные различия между задачами. При монокулярном зрении значительные различия в ошибках наблюдались только на латеральной оси.
Анализ данных и статистическая значимость
Более того, мы observed, что ошибки на латеральной и глубинной осях были пропорциональны требуемому движению на этих осях при бинокулярном зрении, и подтвердили, что требуемое движение по глубине при бинокулярном зрении определяло ошибку глубины независимо от других осей. Это открытие implies, что мозг может независимо обрабатывать информацию бинокулярного зрения на каждой оси.
Между тем, требуемое движение по глубине при монокулярном зрении не зависело от производительности вдоль оси глубины, что указывает на трудноуправляемое поведение. Наши выводы подчеркивают важность обработки движения по глубине, особенно когда генерируется ситуация виртуальной реальности, involving задачи слежения.
Обсуждение и выводы
В этом исследовании мы количественно оценили производительность слежения при круговых движениях с использованием трех типов задач с разными плоскостями глубины в 3D VR-пространстве. В частности, мы adopted два условия зрения (бинокулярное и монокулярное зрение) и исследовали влияние требуемого движения вдоль оси глубины во время задач слежения в 3D VR-пространстве.
Разница между монокулярным и бинокулярным зрением может быть результатом нескольких типов информации, доступной только при бинокулярном зрении, которые могут включать бинокулярное зрение, involving лучшее понимание свойств целевого объекта. Преимущество бинокулярного зрения связано с пространственной точностью при выполнении задач. Более того, его превосходство было reported в нескольких моторных задачах, involving ловлю или ходьбу, а также при выполнении задач, требующих сложных моторных навыков, таких как курок или обращение с инструментами, что поддерживает валидацию наших результатов.
Будущие направления исследований
Несколько факторов следует учитывать в будущих исследованиях. Поскольку визуальная информация, включая информацию о глубине, скорее всего, используется больше во время контроля по обратной связи, чем во время упреждающего контроля, следует учитывать, как информация о глубине используется during движения слежения. Поскольку производительность слежения в основном управляется упреждающим контролем, а контроль по обратной связи иногда используется для коррекции ошибок, следует исследовать частоту, продолжительность и фазу актов обратной связи.
Кроме того, мы adopted постоянную скорость цели, но эта скорость влияет на моторный контроль в задаче слежения. Общее бинокулярное движение человека adjusted к естественной среде; следовательно, движение глаз во время задачи также может быть измерено, чтобы увидеть, насколько требуемое движение глаз для задачи отличается от скорректированного движения глаз в будущем исследовании. Сообщалось, что предсказуемость цели может изменить стратегию контроля в задачах слежения.
Хотя эти факторы затрудняют исследование движения слежения, как первый шаг, мы обнаружили, что мозг может обрабатывать информацию на каждой оси независимо при бинокулярном зрении. Более того, процесс генерации ошибок может involve больше аспектов, и возможно исследовать его с биомеханической и физиологической точек зрения.
Наше исследование подтвердило, что информация о глубине при бинокулярном зрении обрабатывается независимо от информации на других осях, тогда как монокулярное зрение involved трудноуправляемое поведение.