
Интересное сегодня

Введение в этику риска автономных транспортных средств
Детерминированные дилеммы, напоминающие проблему вагонетки (trolley problem), до сих пор преобладают в этических дискуссиях об автономных транспортных средствах (АТС). Это упускает из виду тот факт, что дорожное движение не является детерминированным, а связано с различными уровнями риска, зависящими от многочисленных факторов, таких как погодные условия, поведение участников дорожного движения, технические неисправности и так далее. Подключенные АТС могут быть шансом для более осознанного управления дорожными рисками, чем это позволяет импульсивное ручное управление.
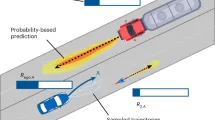
Однако, сосредотачиваясь на неизбежных столкновениях, современная этическая перспектива устанавливает вероятность столкновения равной единице и обсуждает исключительно тяжесть последствий. С другой стороны, инженерная перспектива essentially guided by collision avoidance, и поэтому ставит под сомнение актуальность этики неизбежных столкновений. Фокус инженерии направлен на минимизацию вероятности столкновений. Обе перспективы neglect the fact that любой маневр в повседневном дорожном движении представляет собой перераспределение рисков, которое является функцией как вероятности столкновения, так и тяжести его последствий.
Сложность этических вопросов в условиях неопределенности
До недавнего времени моральная философия не занималась систематически этическими вопросами риска. Сложности, возникающие в недетерминированном мире, традиционно рассматривались в области теории принятия решений, в то время как этика занималась четко определенными ситуациями. Этика риска признает, что с наложением риска возникают сложные проблемы, которые нельзя избежать простым вероятностным смешением потенциальных исходов.
Это можно проиллюстрировать простым примером. Утилитарист явно предпочитает верную смерть одного человека верной смерти двух. Однако не так очевидно, предпочтет ли утилитарист риск смерти одного человека с вероятностью одна вторая риску смерти двух человек с вероятностью одна третья.
Дизайн исследования
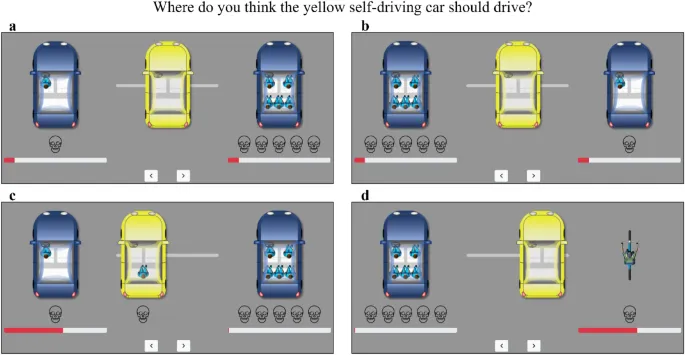
Для выявления интуитивных представлений обычных людей о распределении рисков в повседневном дорожном движении мы разработали графический интерфейс, изображающий типичную дорожную ситуацию в будущем с АТС, работающими в смешанном движении. Во всех ситуациях самоуправляемый (желтый) автомобиль был изображен между двумя другими участниками дорожного движения. Участники могли постепенно регулировать его положение движения между ними с помощью 99 шагов, перетаскивая желтый автомобиль влево или вправо или используя клавиши со стрелками под ним.
Участникам было сказано, что общая вероятность столкновения очень мала, но не равна нулю, и что вероятность столкновения с любым из транспортных средств зависит от дистанции безопасности желтого автомобиля. Чем меньше это расстояние, тем больше вероятность столкновения с этим транспортным средством, при условии, что желтый автомобиль не может столкнуться с обоими транспортными средствами одновременно. Кроме того, предполагалось, что в случае столкновения все вовлеченные стороны погибнут.
Методология сбора данных
Мы представили задачу по позиционированию АТС репрезентативной выборке из 1807 участников в Германии. Каждый участник оценивал только одну дорожную ситуацию, и начальное положение желтого автомобиля всегда выбиралось случайным образом. Мы варьировали дорожные ситуации по трем измерениям: во-первых, количество пассажиров в двух других автомобилях слева и справа от желтого АТС; во-вторых, тип транспортного средства на правой стороне дороги (автомобиль с одним пассажиром или один велосипедист); и, наконец, были ли сами участники частью дорожной ситуации, находясь пассажирами в желтом АТС.
Чтобы графически выделить возможное обоснование избегания столкновений в наших дорожных ситуациях, мы визуализировали вероятность столкновения с левым или правым транспортным средством с помощью красных полос под соответствующим транспортным средством. Среднее положение движения АТС между двумя другими транспортными средствами минимизировало общую вероятность столкновения. Эта вероятность росла экспоненциально с отклонениями от среднего положения движения.
Результаты исследования
Результаты нашего исследования выявили несколько fascinating закономерностей в том, как люди распределяют риски в дорожном движении.
Влияние количества других участников дорожного движения
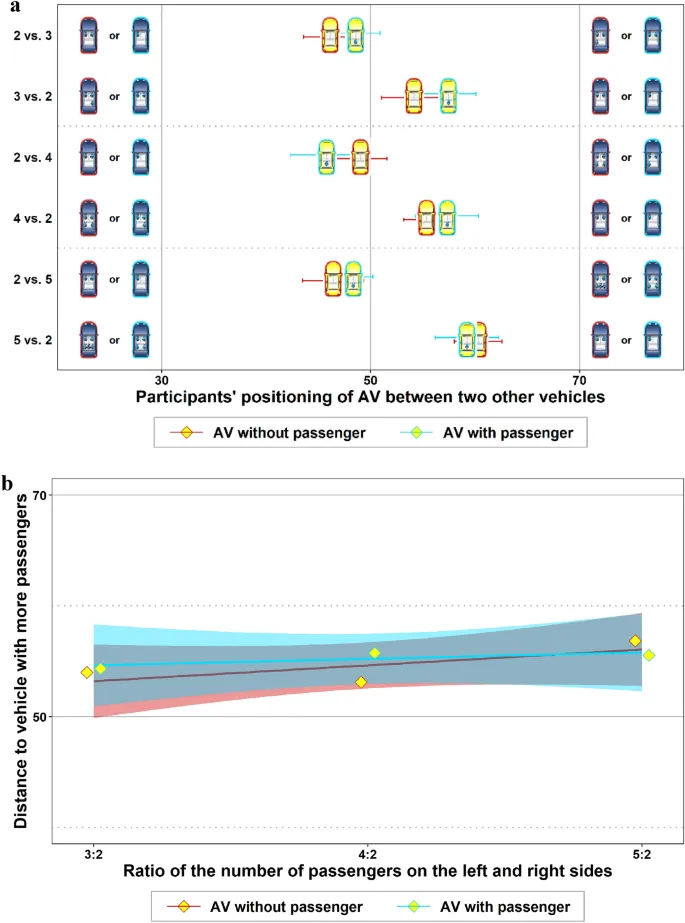
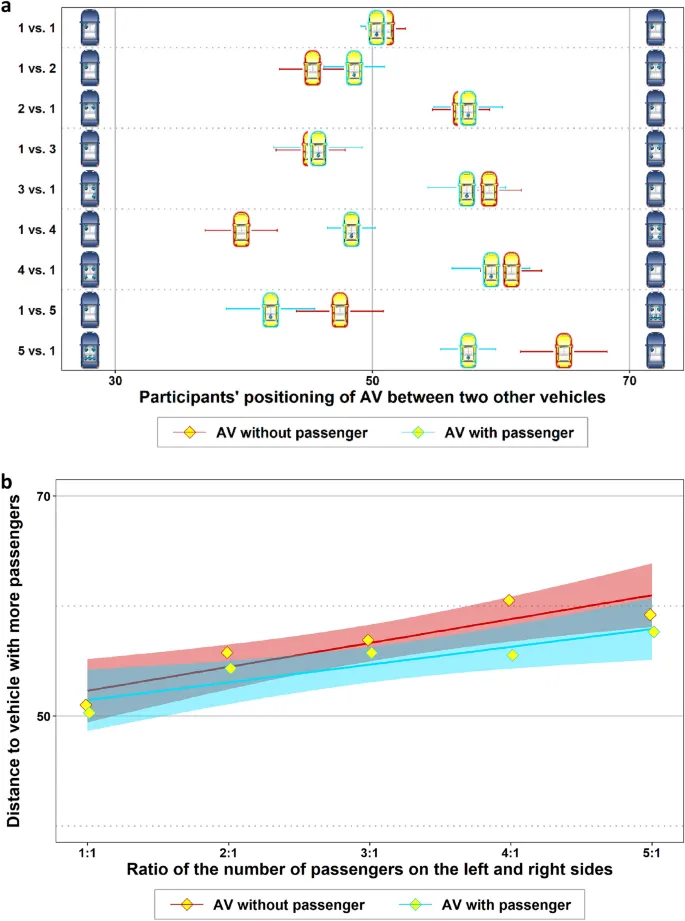
Среднее позиционирование участниками АТС между двумя другими автомобилями, где количество пассажиров в последних варьировалось, показало, что участники учитывали количество пассажиров в двух других автомобилях при позиционировании АТС. Сравнивая каждую из попарно зеркальных дорожных ситуаций, которые differed only in terms of того, появлялось ли больше пассажиров в автомобилях на левой или правой стороне дороги, среднее положение движения АТС значительно отличалось во всех этих парных ситуациях.
В среднем участники всегда positioned the AV closer to the car with fewer passengers. Это указывает на то, что участники были готовы увеличить риск столкновения с автомобилем с меньшим количеством пассажиров, чтобы уменьшить риск столкновения с автомобилем с большим количеством пассажиров. Этот эффект усиливался по мере увеличения разницы в количестве пассажиров между двумя автомобилями.
Влияние личной вовлеченности
Интересно, что когда участники были пассажирами в АТС, они positioned the AV significantly closer to the car with fewer passengers, чем когда они не были частью дорожной ситуации. Это означает, что, будучи пассажирами, они были готовы принять на себя больший риск столкновения для пользы других участников дорожного движения. Участники добровольно увеличивали вероятность столкновения для себя, чтобы уменьшить вероятность более серьезного столкновения с автомобилем с большим количеством пассажиров.
Влияние типа других участников дорожного движения
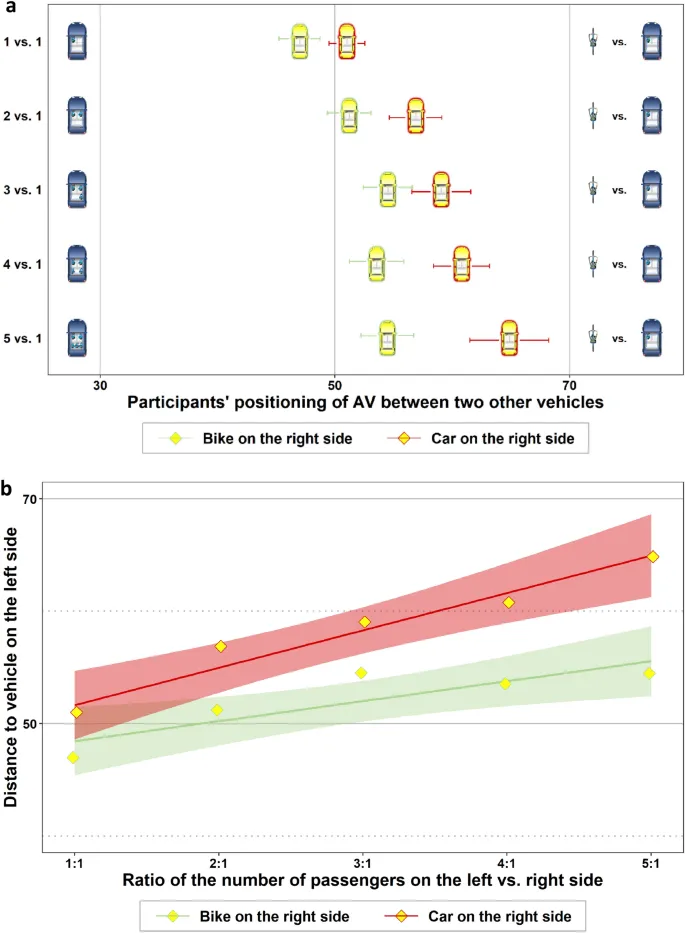
Участники учитывали не только количество потенциальных жертв столкновения, но и тип других участников дорожного движения. Когда АТС двигался между автомобилем с одним пассажиром и одним велосипедистом, велосипедисту предоставлялось marginally more safety distance at the expense of the car passenger.
По мере увеличения количества пассажиров в автомобиле на левой стороне, АТС позиционировался ближе к велосипедисту, точно так же, как если бы на правой стороне дороги был автомобиль с одним пассажиром. Это может указывать на небольшой бонус риска, attributed to the cyclist участниками в наших сценариях. Нормативно бонус риска велосипедиста может быть оправдан его или ее lower imposition of traffic risks на других участников дорожного движения.
Дополнительное исследование: минимальная вероятность столкновения для АТС
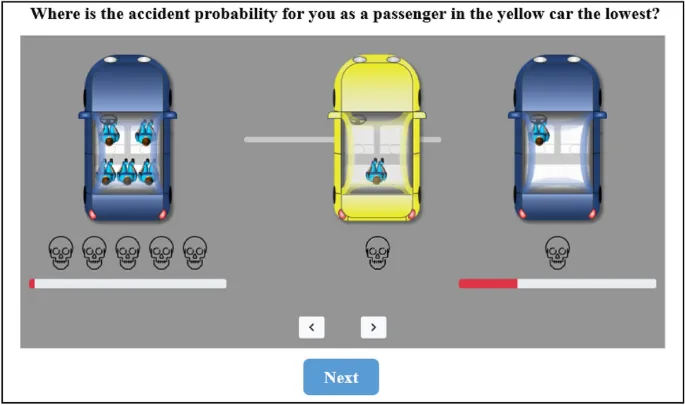
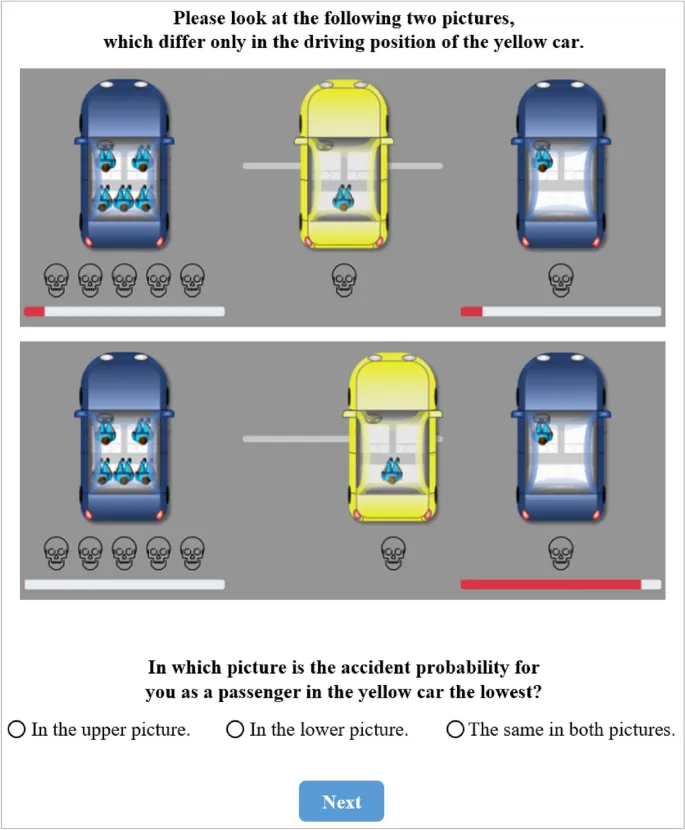
Тот факт, что участники были готовы принять на себя небольшие риски для себя ради benefit of others, когда они были пассажирами в АТС, является удивительным, особенно в свете выявленной "социальной дилеммы автономных транспортных средств". Чтобы убедиться, что участники действительно поняли, что среднее положение движения между двумя другими транспортными средствами minimizes the probability of a collision для них как пассажиров в АТС, мы провели дополнительное исследование.
В дополнительном исследовании мы повторно пригласили случайно выбранную подвыборку из основного исследования с целью набрать 100 участников. Мы implemented two treatments, оба из которых были основаны на одной и той же дорожной ситуации. В каждом случае участники были пассажирами, сидящими в (желтом) АТС, и было пять пассажиров в (синем) автомобиле слева и один пассажир в (синем) автомобиле справа.
Результаты показали, что почти все участники дополнительного исследования поняли, где находится наименьшая вероятность столкновения для АТС в нашей дорожной ситуации. Таким образом, можно разумно предположить, что участники нашего основного исследования сознательно принимали риски и делали это не только из-за ошибочного понимания дорожной ситуации.
Обсуждение и выводы
Моральные дилеммы в дорожном движении не ограничиваются сценариями неизбежных столкновений, которые просто требуют экстренного торможения. Участие в повседневном дорожном движении влечет за собой распределение рисков между участниками дорожного движения. Это raises ethical questions, особенно когда это распределение enforced by AVs.
Патенты от Google и других показывают, что автомобильная промышленность размышляет об управлении рисками АТС и что их поведение при вождении может быть скорректировано с учетом рисков, создаваемых для других участников дорожного движения.
Вопрос в том, какие переменные должны быть включены в это управление рисками и как АТС должны then select the supposedly right maneuver из нескольких возможных. Чтобы отразить моральные интуиции населения Германии, алгоритм вождения должен учитывать количество потенциальных жертв столкновения и, возможно, тип участников дорожного движения при определении поведения АТС при вождении. Это neglected if mere collision avoidance определяет программирование алгоритмов вождения.
Социальные и этические последствия
Даже если людей просят представить, что они являются пассажирами, они выражают свое согласие на более высокую вероятность столкновения для себя, если это уменьшает вероятность более серьезного столкновения для других. Это примечательно в отношении социальной дилеммы АТС, выявленной в контексте неизбежных столкновений. Мы обнаруживаем, что люди more altruistic in the risky than in the deterministic domain.
Понятно, что можно быть более готовым спасти ребенка из горящего здания, если есть шанс выжить, чем если быть уверенным в смерти. Это расхождение в заявленных предпочтениях provides another reason сместить этику АТС от крайнего случая неизбежных столкновений к регулярному случаю распределения рисков в обыденных дорожных маневрах.
Методология исследования
Онлайн-опрос был запрограммирован с помощью программного обеспечения oTree и проведен в Германии в декабре 2021 года с помощью поставщика услуг по проведению опросов Cint. Всего 1807 участников completed the survey, и репрезентативность этой выборки была обеспечена поставщиком опроса в соответствии с переменными возраст (от 18 до 69 лет), пол и федеральная земля.
Исследование было проведено в соответствии с принципами Хельсинкской декларации и одобрено Институциональным наблюдательным советом Немецкой ассоциации экспериментальных экономических исследований. До проведения исследования оно было зарегистрировано с полными деталями, включая количество treatment groups, количество участников и запланированный анализ данных.
Процедура проведения опроса
В начале опроса мы получили информированное согласие всех респондентов на участие в исследовании. Subsequently, дорожная ситуация, их задача и графический интерфейс были описаны участникам. После этого participants had to answer два контрольных вопроса об описанной дорожной ситуации. Только участники, которые answered these two control questions correctly, qualified to take part in the rest of the survey.
После правильного ответа на контрольные вопросы участники столкнулись с дорожной ситуацией, в которой они должны были positioned the yellow AV между двумя другими транспортными средствами так, как они считали correct. Все участники столкнулись только с одной дорожной ситуацией, и эта ситуация была drawn at random из 29 возможных ситуаций.
После позиционирования (желтого) АТС участники answered a small questionnaire, в котором мы спрашивали о некоторых демографических и личных характеристиках. После этого опрос был завершен. Медианное время ответа на опрос составило около 4,5 минут.
Демографические характеристики выборки
В общей сложности у нас было 50,2% женщин, а средний возраст участников составил 44 года. 93% участников имели водительские права, и 78% сообщили, что сами regularly drive a vehicle (т.е. не менее двух раз в неделю в качестве водителя). Со средним показателем 2,5 по шкале от 0 («совсем нет») до 6 («очень сильно») участники не particularly looking forward to a future with self-driving cars.





