Интересное сегодня


Введение: Понимание чувства собственной активности (SoA)
Чувство собственной активности (Sense of Agency, SoA) – это ощущение контроля над собственными действиями и их последствиями, возникающее во взаимодействии с внешним миром. В течение последних двадцати лет парадигма намеренного связывания (Intentional Binding, IB) активно использовалась для изучения неявного SoA. Она демонстрирует, что добровольные действия и их сенсорные последствия воспринимаются как смещенные друг к другу во времени. Этот эффект получил название эффекта намеренного связывания (IB effect). Стоит отметить, что эффект IB может возникать не только в отношении собственных действий, но и в отношении действий других людей, что приводит к так называемому «викарному» SoA. Интересно, что недавние исследования показали, что искусственные агенты также могут вызывать викарное SoA у людей или влиять на SoA в целом. Например, в одном из экспериментов изучалось, как SoA, измеренное с помощью парадигмы IB, изменяется, когда действия участников выполнялись по инструкциям другого человека по сравнению с гуманоидным роботом, а не выбирались свободно. Хотя эффект IB был сильнее, когда участники свободно выбирали свои действия из четырех вариантов нажатия клавиш, результаты также показали, что чем больше люди приписывали роботу человекоподобных характеристик, таких как антропоморфизм, симпатия и воспринимаемый интеллект, тем сильнее проявлялся эффект IB в отношении действий, продиктованных роботом.
Интересные находки были также получены при изучении феномена SoA в условиях виртуальной реальности (VR). Например, когда участники находились в среде VR и им было предложено выполнять движения, отображаемые на экране с перспективы первого лица человекоподобного аватара, они испытывали повышенное SoA в отношении этих движений после двух сеансов обучения по сравнению с контрольной группой, которая не проходила обучение в среде VR. Более того, недавнее исследование изучало, модулируется ли эффект IB информацией, специфичной для тела. Авторы использовали VR для манипулирования двумя ключевыми аспектами обратной связи о движении. Во-первых, форма: участники видели виртуальную руку или сферу. Во-вторых, согласованность движения: видимый объект двигался согласованно или несогласованно со скрытой рукой участников. Результаты показали, что только согласованность движения, а не форма, влияла на эффект IB. Следовательно, возможно, что при изучении феномена викарного SoA в условиях VR, человекоподобная (антропоморфная) форма не является ключевым фактором. Действительно, при управлении виртуальными аватарами SoA, по-видимому, возникает даже тогда, когда аватары не имеют человекоподобной формы, как в случае с точечно-линейными аватарами, когда они значительно отклоняются от формы физического тела, и даже когда виртуальные конечности представлены в неправдоподобных положениях.
Напротив, при изучении феномена викарного SoA в реальных физических условиях, разделенных с воплощенными искусственными партнерами, человекоподобная (антропоморфная) форма, по-видимому, является важным фактором. Например, данные в области взаимодействия человека и робота (HRI) предполагают, что воплощенная антропоморфная рука в действии демонстрировала аналогичные эффекты IB, как и другие люди. Однако викарный эффект IB не был обнаружен для действий, выполняемых роботом, который не демонстрировал человекоподобных черт. Таким образом, сравнивая результаты из VR и физических сред, представляется, что различные факторы могут играть роль в возникновении викарного SoA по отношению к искусственным агентам.
Тот факт, что в реальных физических условиях характеристики воплощения (человекоподобные против неантропоморфных) играют роль в SoA, может быть связан с тем, насколько воплощенное действие другого агента вызывает сенсомоторную репрезентацию этого действия у наблюдателя-человека. Возможно, чем больше человекоподобных черт демонстрирует искусственный агент, тем точнее люди репрезентируют его действия на сенсомоторном уровне. Следовательно, тем вероятнее будет наблюдаться викарное SoA. Этот довод основан на идее, что неявное SoA зависит от способности человека формировать сенсомоторную репрезентацию действия. Недавнее исследование IB подтверждает этот довод. В этом исследовании участники выполняли задачу IB, оценивая время возникновения действий, генерируемых неантропоморфным роботом Cozmo, и сенсорных последствий действий (звуковых тонов). Cozmo был запрограммирован на выполнение физических или цифровых действий. Результаты показали, что викарное SoA для сенсорных последствий действий робота возникало только тогда, когда вызывающие действия были физическими, а не в условиях «цифрового» действия. Это было интерпретировано как результат того, что связи между цифровым действием и его следствием, генерируемые искусственными агентами, могут не вызывать сенсомоторную репрезентацию действия. Интересно, что в том же исследовании авторы наблюдали, что приписывание намерений также играло роль в викарном чувстве собственной активности по отношению к неантропоморфному роботу.
Цели исследования
Учитывая важность человекоподобных черт воплощенного агента для возникновения SoA, настоящее исследование изучало викарное SoA в контексте парадигмы IB, выполняемой с гуманоидным роботом iCub. Гуманоидный робот означает, что он относительно схож с человеческой формой, с подобными эффекторами, как у людей. Кроме того, мы изучили, зависит ли викарное SoA по отношению к гуманоидному роботу от приписывания ему намерений. Участники выполняли задачу IB как самостоятельно (Solo), так и с роботом iCub (Social). Для проверки потенциальной роли приписывания намерений, перед экспериментом участники заполнили опросник Waytz, который измеряет индивидуальный уровень вероятности приписывания намерений роботам.
Мы предположили, что если человекоподобная форма робота и его эффекторы достаточны для вызова викарного SoA, то сравнимый эффект IB должен проявиться как для действий, генерируемых самим собой, так и для действий iCub, без какой-либо связи между эффектом IB и индивидуальной вероятностью приписывания намерений роботам. Напротив, если приписывание намерений играет роль в викарном SoA, можно было бы ожидать, что чем выше степень приписываемого намерения роботам в целом, тем сильнее будет викарный эффект IB на индивидуальном уровне.
Материалы и методы
Участники
В исследовании приняли участие тридцать четыре участника (возраст: 18–45 лет, средний возраст = 26.5, стандартное отклонение = 6.14; 4 левши, 16 мужчин). Все участники имели нормальное или скорректированное до нормального зрение и были наивны относительно цели исследования. Размер выборки определялся на основе априорного анализа мощности для оценки необходимой выборки для получения надежных результатов. Мы использовали пакет pwr в R Studio v.4.0.5, рассматривая f2 как наиболее надежный размер эффекта, измеренный для моделей со смешанными эффектами, которые были запланированы для анализа. Мы использовали средний-большой размер эффекта (f2 = 0.3); уровень значимости (альфа) был установлен на 0.05, а мощность теста – на 0.95. Результаты показали, что для получения надежных результатов необходим размер выборки N = 30. Мы протестировали 34 участника, чтобы учесть возможный исключение некоторых участников из анализа. Исследование проводилось с одобрения местного этического комитета (Comitato Etico Regione Liguria) и в соответствии с этическими стандартами, изложенными в Хельсинкской декларации 2013 года. Все участники предоставили письменное информированное согласие до начала эксперимента и получили 15 евро за участие. После эксперимента все участники были проинформированы о цели исследования.
Оборудование и стимулы
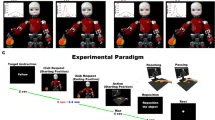
Экспериментальное оборудование включало гуманоидного робота iCub, рабочую станцию, оснащенную двумя 27-дюймовыми мониторами для отображения задачи (разрешение 1920 × 1200), двумя комплектами динамиков и двумя одинаковыми клавиатурами QWERTY, одна для участников, другая для iCub (см. Рис. 1; было получено письменное информированное согласие на публикацию Рис. 1). Участники сидели примерно в 70 см от экрана компьютера. Презентация стимулов и сбор ответов контролировались с помощью Psychopy v.2021.2.0. Гуманоидный робот iCub был подключен к рабочей станции через Ethernet-соединение peer-to-peer (см. Дополнительные материалы, пункт SM.2, стр. 4, для получения дополнительной информации о том, как робот был интегрирован и контролировался). Опросник Waytz был представлен с использованием OpenSesame v.3.
Процедура
Перед выполнением задачи участники заполнили опросник Waytz. Затем они выполняли задачу IB как самостоятельно (Solo Context), так и с роботом iCub (Social Context).
Каждый контекст (Solo, Social) включал два типа (под)блоков по 40 испытаний в каждом, т.е. блок Baseline (базовый) и блок Operant (рабочий), представленные в случайном порядке. В блоке Baseline критическое событие (т.е. действие) не производило никакого звукового сигнала, тогда как в блоке Operant действие производило звуковой сигнал через 250 мс после него (440 Гц, 100 мс; см. Дополнительные материалы, пункт SM.1, стр. 2, для получения дополнительной информации). В контексте Solo участники выполняли задачу самостоятельно, а iCub находился в отдельной комнате. В контексте Social участники входили в комнату, где робот уже был активирован, с рукой, расположенной на его клавиатуре. В контексте Solo задачей участников было выполнить нажатие клавиши в выбранное ими время, а затем сообщить время, когда было сделано нажатие клавиши. В контексте Social задачей было сообщить время, когда iCub выполнил нажатие клавиши. Перед задачей проводилась практическая сессия (т.е. шестнадцать испытаний, по четыре для каждой комбинации блока и контекста).
Последовательность испытаний
В начале каждого испытания на экране появлялась точка фиксации в течение 1000 мс, затем изображение часов с красной секундной стрелкой (длина = 135 пикселей) в статичном положении в течение 500 мс. После этого стрелка часов начинала вращаться по часовой стрелке, каждое вращение длилось 2560 мс. Для каждого испытания максимальное количество вращений было установлено на 10. Стрелка часов останавливалась случайным образом между 1500 и 2500 мс после произошедшего действия. В контексте Solo участникам было предложено подождать до конца первого полного оборота стрелки часов, а затем выполнить нажатие клавиши в выбранное ими время. В контексте Social робот iCub был запрограммирован на выполнение нажатия клавиши в случайное время после первого полного оборота стрелки часов, в пределах предопределенного временного окна (2500–8000 мс).
В конце каждого испытания участники должны были сообщить время, указанное стрелкой часов, когда они — или iCub — выполнили нажатие клавиши. Чтобы убедиться, что участники обращали внимание на действия iCub, робот был запрограммирован на нажатие в 90% испытаний. Участникам было предложено, что если iCub не действовал до конца десятого оборота, они должны были выполнить нажатие клавиши самостоятельно; в противном случае они теряли 10 очков из начальных 120.
Викарное чувство собственной активности
Статистический анализ
Для каждого испытания мы оценивали Ошибку Суждения (Judgment Error, JE), то есть «минутную» разницу между положением стрелки часов на дисплее часов, сообщенным участниками, и ее фактическим положением во время выполнения нажатия клавиши. Затем «минутные» JE преобразовывались в «миллисекундные» JE (минутные JE × 2560 мс / 60). Для каждого типа блока (Baseline, Operant) мы рассчитывали средние JE и их стандартные отклонения. JE, которые отклонялись более чем на ±2.5 стандартных отклонения от среднего значения участников для каждого типа блока, считались выбросами и удалялись из анализа (3.38% от общего числа испытаний; средние JE = 26.9 мс, SD = 435.77 мс). Данные трех участников были исключены из-за низкого количества оставшихся испытаний в контексте Social после удаления выбросов (< 30 испытаний в блоке Baseline или Operant, или обоих), что привело к размеру выборки N = 31. Затем JE моделировались как функция типа блока (Baseline, Operant) и контекста (Solo, Social), плюс их взаимодействия, как фиксированные эффекты, и участник как случайный эффект. Обратите внимание, что IB для событий действий, а именно эффект привязки действий (Action Binding effect), определяется как менее отрицательные JE времени события действия для блока Operant по сравнению с блоком Baseline. Анализ проводился с использованием пакета lme4 для моделей линейных смешанных эффектов в R studio v. 4.0.5. Оцененные параметры (β) и их связанные t-тесты (t, p-значение) рассчитывались с использованием метода аппроксимации Саттертуэйта для степеней свободы; они сообщались с соответствующими бутстрепированными 95% доверительными интервалами.
Результаты
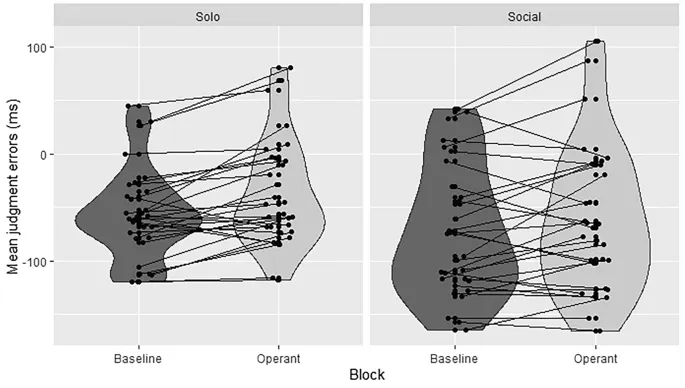
Результаты показали значимый основной эффект типа блока [β = 10.56, SE = 3.13, t(30) = 3.37, p = 0.0007, CI (4.42; 16.69)], с менее отрицательными JE в блоке Operant по сравнению с блоком Baseline [β = −14.7, SE = 2.16, t(30) = −6.81, p < 0.0001, CI (−18.9; −10.5); (MOperant = −49.9 мс, SEOperant = 8.74; MBaseline = −64.6 мс, SEBaseline = 8.74)]. Кроме того, появился значимый основной эффект контекста [β = 16.01, SE = 3.04, t(30) = 5.25, p < 0.0001, CI (10.04; 21.99)], с менее отрицательными JE в контексте Solo по сравнению с контекстом Social [β = −20.1, SE = 2.16, t(30) = −9.34, p < 0.0001, CI (−24.4; −15.9); (MSolo = −47.2 мс, SESolo = 8.74; MSocial = −67.3 мс, SESocial = 8.74)]. Примечательно, что взаимодействие Block * Context было не значимым [β = 8.24, SE = 4.31, t(30) = 1.91, p = 0.05, CI = (−0.2; 16.69)] (см. Рис. 2).
Приписывание намерений
Статистический анализ
Для проверки связи между приписыванием намерений, как индексируемым по шкале Waytz, и викарным SoA, мы выбрали только испытания в контексте Social, то есть когда участники сообщали время возникновения действий iCub. Данные еще одного участника были исключены из-за незавершенного заполнения опросника Waytz, что привело к размеру выборки N = 30 для этого анализа. Социальные JE моделировались как функция как типа блока (Baseline, Operant), так и шкалы Waytz, плюс их взаимодействия, как фиксированные эффекты, и участник как случайный эффект. Анализ проводился с использованием пакета lme4 в R studio v. 4.0.5. Оцененные параметры (β) и их связанные t-тесты (t, p-значение) рассчитывались с использованием метода аппроксимации Саттертуэйта для степеней свободы, а затем сообщались с соответствующими бутстрепированными 95% доверительными интервалами.
Результаты
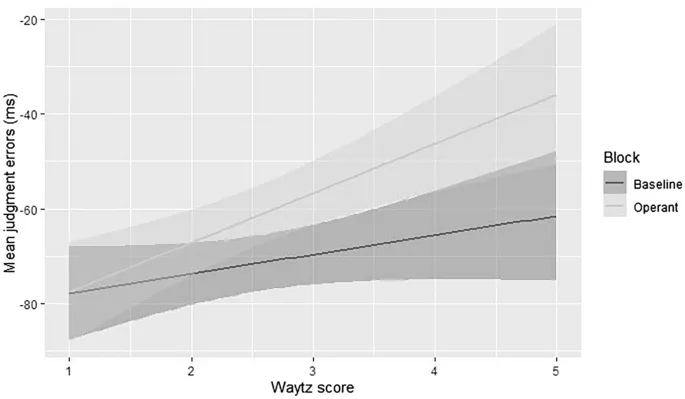
Результаты показали отсутствие основного эффекта блока [β = −5.85, SE = 8.52, t(29) = −0.68, p = 0.49, CI = (−22.55; 10.84)]. Кроме того, не было значимого основного эффекта Waytz [β = 4.34, SE = 10.09, t(29) = 0.43, p = 0.67, CI = (−15.38; 24.07)]. Примечательно, что взаимодействие Block * Waytz оказалось значимым [β = 6.4, t(29) = 2.1, p = 0.03, CI (0.44; 12.35)]. В частности, шкала Waytz предсказывала JE только в блоке Operant [β = 10.41, SE = 2.78, t(29) = 3.74, p = 0.0009, CI (4.96; 15.87)], но не в блоке Baseline [β = 4.07, SE = 2.58, t(29) = 1.57, p = 0.11, CI (−0.99; 9.13)] (см. Рис. 3).
Общая дискуссия
Настоящее исследование изучало, может ли викарное SoA возникать по отношению к роботу, если он имеет человекоподобную форму. Морфологическое сходство между гуманоидным роботом и человеком может позволить людям генерировать сенсомоторную репрезентацию действий робота, подобно своим собственным действиям. Однако, что интересно, индивидуальная склонность приписывать намерения роботам дополнительно «усиливает» викарное SoA по отношению к гуманоидным роботам. Это означает, что викарное SoA может служить косвенной неявной мерой приписываемого намерения по отношению к искусственным агентам.
В нашем исследовании участники выполняли задачу IB как самостоятельно (Solo Context), так и с гуманоидным роботом iCub (Social Context). Для оценки роли приписывания намерений участники заполнили опросник Waytz перед экспериментом. Нашей зависимой мерой была Ошибка Суждения (JE) в задаче IB, т.е. разница между воспринимаемым и фактическим положением стрелки часов во время возникновения критического события (действия).
Результаты показали, что участники испытывали SoA как по отношению к действиям, генерируемым ими самими, так и по отношению к действиям iCub, о чем свидетельствует значительный эффект IB действий, проявившийся как в контекстах Solo, так и Social. Более того, величина SoA в форме эффекта IB была сопоставима в разных контекстах (Solo против Social), поскольку взаимодействие Block*Context не оказалось значимым (см. Дополнительные материалы, пункт SM.4, стр. 7, для получения дополнительной информации).
В целом, наши результаты демонстрируют, что викарное SoA возникло по отношению к гуманоидному роботу iCub, предположительно из-за человекоподобной формы робота, которая позволила участникам создать сенсомоторную репрезентацию его действий. Действительно, «моторная» модель SoA, а именно Компараторная Модель, предполагает, что люди репрезентируют на сенсомоторном уровне причинно-следственную связь между действиями и их сенсорными последствиями. Возможность создания сенсомоторной репрезентации связи «действие-следствие» была бы тесно связана с опытом агентности. В соответствии с этим, также викарное SoA может опираться на те же предиктивные механизмы. Это может объяснить предыдущие данные, показывающие отсутствие викарного SoA для цифровых действий робота или физических действий, выполненных с нечеловеческим эффектором. В обоих случаях действие робота не могло обеспечить точную сенсомоторную репрезентацию. Напротив, викарное SoA возникло в форме эффекта IB, когда участники оценивали возникновение действий, генерируемых роботизированной рукой, напоминающей человекоподобную форму: в этом случае человекоподобная форма могла позволить сформировать точную сенсомоторную репрезентацию действий робота.
В ключевом исследовании Wohlschläger и коллеги уже предполагали роль сенсомоторной репрезентации для возникновения викарного SoA при изучении осведомленности о действиях, выполняемых самим собой, другим человеком или машиной. Авторы обнаружили, что воспринимаемое время начала собственных действий было сопоставимо с воспринимаемым временем начала действий другого человека. Однако оба были существенно позже воспринимаемого начала физически сравнимого машинного действия. Это привело к более отрицательным JE для события машинного действия по сравнению с суждениями о действиях собственного или других людей, что предполагает более точное осознание человеческих действий. По мнению авторов, одно из объяснений может заключаться в том, что восприятие биологического движения более точно по сравнению с движением, выполняемым механическим агентом. Примечательно, что та же закономерность, что и в исследовании Wohlschläger и коллег, проявилась и в нашем исследовании, на что указывают менее отрицательные JE (т.е. ближе к 0) в контексте Solo по сравнению с контекстом Social.
Интересно, что авторы той же статьи предложили другое объяснение, согласно которому викарное SoA может быть связано со степенью намерения, приписываемого ко-агенту. Они предположили, что люди могут приписывать намерения другим так же, как и себе, и поэтому оценки действий, генерируемых самим собой, сопоставимы с оценками действий, генерируемых другими людьми; то же самое может не происходить с машинами. Однако дальнейшие исследования показали, что в некоторых контекстах люди приписывают намерения машинам, таким как роботы. В соответствии с этим, результаты нашего исследования показали, что величина викарного SoA положительно коррелировала со степенью приписываемого намерения. В частности, шкала Waytz предсказывала JE только в блоке Operant, т.е. когда присутствовали оба события (действия и звук), предполагая, что приписывание намерения заставило участников воспринимать действия iCub как связанные с последующим результатом. Другими словами, приписывание намерения может действовать как усиление связи «действие-следствие» и, таким образом, увеличивать величину викарного SoA по отношению к действиям роботов.
Примечательно, что наши результаты повторяют предыдущие данные, показывающие аналогичную положительную связь между степенью приписывания намерений и величиной викарного SoA, который люди испытывают по отношению к действиям, выполняемым неантропоморфным роботом. Кроме того, роль приписывания намерений роботам в возникновении викарного SoA подтверждается исследованиями, показывающими, что робот, воспринимаемый как намеренный агент, может влиять на SoA человека, в отличие от неагентного, пассивного устройства. В аналогичном ключе эти исследования могут объяснить, почему люди не испытывают викарного SoA по отношению к искусственным системам, которые не воспринимаются как намеренные. Следовательно, возможно, что викарное SoA может использоваться как неявная мера приписывания намерений.
Наконец, важно упомянуть некоторые ограничения настоящего исследования. Одним из них является поведенческий характер задачи. Наш выбор использования только поведенческих мер был продиктован обширным количеством литературы, которая использовала поведенческие меры в парадигме IB. Однако в будущих исследованиях было бы важно изучить нейронные маркеры викарного SoA по отношению к искусственным агентам, поскольку данные, предоставленные нашим исследованием, ограничены субъективными суждениями о временной последовательности событий.
Кроме того, природа задачи может не обладать экологической валидностью. Действительно, задача IB, которая заключается в сообщении положения стрелки часов при возникновении критического события, не является обычной задачей в повседневной жизни, особенно если мы представляем задачи, которые совместно выполняются с роботами. Таким образом, будущие исследования могут рассмотреть возможность проведения экспериментов по викарному SoA в установках с более высокой экологической валидностью.
Выводы
В совокупности наши результаты демонстрируют, что викарное SoA может возникать по отношению к роботу, когда он имеет человекоподобную форму. Морфологическое сходство между гуманоидным роботом и человеком может позволить людям генерировать сенсомоторную репрезентацию действий робота, аналогичную собственным действиям. Однако, что интересно, индивидуальная тенденция приписывать намерения роботам дополнительно «усиливает» викарное SoA по отношению к гуманоидным роботам. Это означает, что викарное SoA может служить косвенной неявной мерой приписываемого намерения по отношению к искусственным агентам.