Интересное сегодня


Тактильная фасилитация при ожидании и фактическом получении объекта
Введение
Во время движений, связанных с прицеливанием и захватом, тактильная обработка, как правило, подавляется. Это явление, известное как тактильное подавление, наблюдается при различных движениях, от простых отведений пальцев до более сложных действий по прицеливанию и захвату. Основная цель таких движений – захватить целевой объект. Однако существуют ситуации, когда объект может быть получен без активного движения, например, при приеме или ловле предмета. В таких случаях процессы подавления, связанные с выполнением движения, могут быть менее выражены или отсутствовать вовсе. Вместо этого тактильная информация может быть облегчена по мере приближения объекта, поскольку ожидание контакта с объектом и использование тактильной обратной связи становятся приоритетными. Целью данного исследования было изучение тактильной обработки в условиях задачи приема объекта. Участники сидели неподвижно, пока объект двигался к их пальцам и контактировал с ними. В разные моменты траектории объекта и до контакта участникам предлагалось обнаружить тактильные стимулы, поданные на указательный палец. Чтобы выяснить, способствовало ли ожидание контакта с объектом какой-либо модуляции тактильной обработки, в 20% случаев объект останавливался преждевременно. По сравнению с исходным уровнем до начала движения объекта, относительные перцептивные пороги снижались на протяжении всей траектории объекта и даже тогда, когда объект останавливался преждевременно. Кроме того, не было выявлено признаков модуляции, когда стимул предъявлялся незадолго до контакта с объектом. Последние результаты позволяют предположить, что тактильная обработка облегчается по мере приближения объекта к руке человека. Также предполагается, что ожидание тактильной обратной связи обуславливает эту модуляцию. Наконец, последние результаты позволяют предположить, что периферическая маскировка могла снизить или полностью устранить любое облегчение.
Тактильное подавление и фасилитация
Механизмы, лежащие в основе тактильного подавления, включают как центральные прогностические, так и периферические механизмы. Центральные механизмы могут использовать копию команды на движение (эфферентную копию) для ослабления ожидаемых сенсорных сигналов. Периферические механизмы, в свою очередь, предполагают, что более сильные афферентные стимулы маскируют восприятие более слабых афферентных стимулов (периферическая маскировка). Важным модулирующим фактором в тактильной обработке во время движения является релевантность тактильной обратной связи для выполняемой задачи. Например, тактильная обратная связь от пальца более важна при захвате объекта, чем при движении руки в целом.
В отличие от подавления, в некоторых контекстах наблюдается фасилитация тактильной обработки. Это происходит, например, при выполнении исследовательских действий, направленных на получение тактильных сигналов, таких как чтение шрифта Брайля. Также тактильное восприятие может улучшаться при приближении к собственной руке без визуальной информации, что указывает на тактильное усиление.
Исследование тактильной обработки при приеме объекта
В данном исследовании изучалась тактильная обработка в условиях приема объекта, когда участники не совершали движения для его захвата. Вместо этого, они сидели неподвижно, пока объект двигался к их пальцам. На разных этапах движения объекта и до контакта участникам предлагалось обнаружить тактильные стимулы.
Гипотезы
- Основная гипотеза: Тактильная обработка будет облегчена, а не подавлена, по мере приближения объекта к руке.
- Гипотеза о предсказании: Ожидание контакта с объектом и последующее использование тактильной обратной связи вызывают облегчение тактильной обработки.
- Гипотеза о зависимости от времени/расстояния: Тактильная обработка может изменяться в зависимости от времени/расстояния объекта относительно руки.
- Гипотеза о периферической маскировке: Предъявление стимула незадолго до контакта с объектом может привести к периферической маскировке, нивелируя любое облегчение.
Методы
Участники
В исследовании приняли участие 16 добровольцев (5 мужчин, 11 женщин, средний возраст 24 года), не имеющих неврологических нарушений. Все участники дали письменное информированное согласие.
Материалы и аппарат
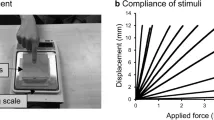
- Объект: Пластиковый стержень диаметром 34 мм.
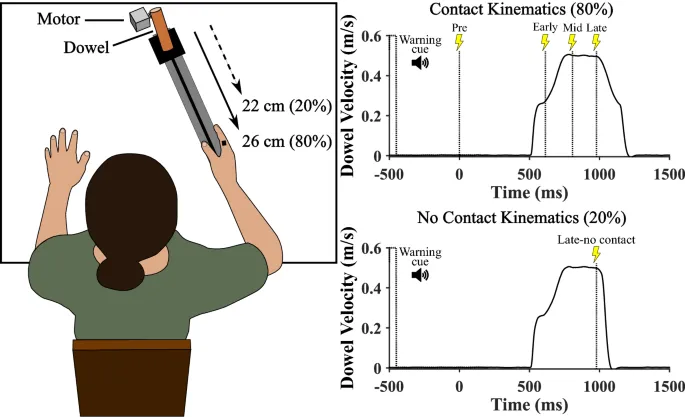
- Система движения: Компьютерно управляемая линейная направляющая со степперным двигателем.
- Тактильная стимуляция: Электрические импульсы (2 мс) подавались на указательный палец через поверхностные электроды. Интенсивность стимула определялась индивидуально с помощью психофизических методов.
- Отслеживание движения: Инфракрасные светодиоды (IRED) использовались для отслеживания движения объекта и пальцев участника.
- Программное обеспечение: Скрипты MATLAB и LabView использовались для управления экспериментом и сбора данных.
Процедура
- Определение порога: Сначала определялся индивидуальный порог тактильного восприятия с помощью лестничной процедуры.
- Основные условия: На каждом этапе эксперимента участнику предъявлялся предупреждающий сигнал, за которым примерно через 1000 мс начиналось движение стержня.
- Предъявление стимулов: Тактильные стимулы предъявлялись в одном из пяти условий:
- Предобъектное движение (Pre object movement): Примерно за 500 мс до начала движения объекта.
- Раннее (Early): Примерно через 114 мс после начала движения (расстояние ~2.8 см).
- Среднее (Middle): Примерно через 308 мс после начала движения (расстояние ~11.4 см).
- Позднее (Late): Примерно через 478 мс после начала движения (расстояние ~19.9 см). В этом условии стержень проезжал 26 см и контактировал с пальцами.
- Позднее без контакта (Latenc): В 20% случаев стержень останавливался на 22 см и не контактировал с пальцами. Стимул предъявлялся примерно через 478 мс после начала движения.
- Регистрация ответов: После каждого предъявления стимула участники сообщали, почувствовали ли они стимул.
- Рандомизация: Порядок предъявления условий и амплитуд стимулов был рандомизирован.
Анализ данных
- Стабильность пальца: Анализировалось смещение указательного пальца в течение 200 мс вокруг времени стимуляции для подтверждения неподвижности участников.
- Восприятие: Рассчитывались психометрические кривые для каждого участника и условия. Определялись пороги обнаружения (стимул, который ощущается в 50% случаев) и вариабельность обнаружения (разница между 75% и 50% порогами).
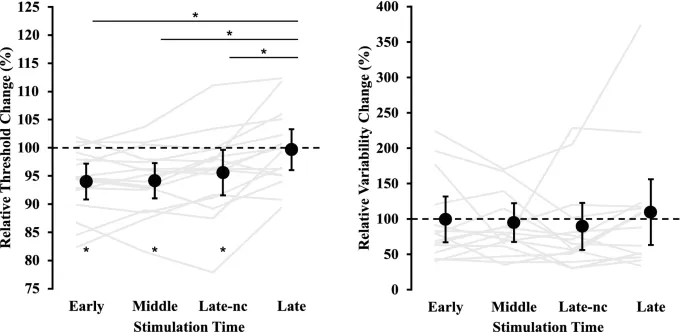
- Относительные изменения: Рассчитывались относительные изменения порогов обнаружения и вариабельности путем сравнения с условием «Предобъектное движение». Значения ниже 100% указывали на фасилитацию, выше 100% – на подавление.
- Статистический анализ: Использовались одновыборочные t-тесты и однофакторный дисперсионный анализ с повторными измерениями (ANOVA) для выявления значимых различий.
Результаты
Тактильная фасилитация
Было обнаружено, что относительные пороги обнаружения в условиях «Раннее», «Среднее» и «Позднее без контакта» были значительно ниже 100%, что указывает на тактильную фасилитацию по сравнению с условием «Предобъектное движение».
- Раннее: t(15) = −4.14, p < 0.01
- Среднее: t(15) = −4.10, p < 0.01
- Позднее без контакта: t(15) = −2.41, p = 0.03
В позднем условии (Late), когда происходил контакт с объектом, значительных изменений в пороге обнаружения не наблюдалось (t(15) = −0.21, p = 0.84).
Влияние времени стимуляции
Однофакторный ANOVA выявил значимое влияние времени стимуляции на относительные пороги обнаружения (F(2.24, 33.52) = 4.11, p < 0.01).
Пост-хок сравнения показали, что относительный порог обнаружения в позднем условии (Late) был значительно выше по сравнению со всеми другими условиями. Это означает, что обнаружение стимула было затруднено незадолго до контакта с объектом.
Вариабельность обнаружения
Относительные изменения вариабельности обнаружения для всех условий не отличались от 100%, и ANOVA не выявил значимого влияния времени стимуляции на вариабельность.
Обсуждение
Результаты исследования подтверждают гипотезу о тактильной фасилитации во время ожидания получения объекта. Снижение перцептивных порогов, наблюдаемое по мере приближения объекта, свидетельствует об усилении обработки тактильной информации. Важно отметить, что фасилитация наблюдалась даже в условиях, когда объект останавливался преждевременно, что позволяет предположить, что ожидание контакта с объектом и использование тактильной обратной связи играют ключевую роль.
Сравнение с предыдущими исследованиями
В отличие от предыдущих исследований, где тактильное восприятие снижалось во время движений, в данном исследовании, где движение отсутствовало, наблюдалось улучшение восприятия. Это может быть связано с отсутствием центральных и периферических механизмов подавления, которые обычно активны во время движения.
Роль ожидания
Результаты условия «Позднее без контакта» (Latenc) убедительно демонстрируют, что ожидание тактильной обратной связи, а не только сам контакт, вызывает фасилитацию. Участники, вероятно, прогнозировали контакт с объектом на основе визуальной информации и предыдущего опыта, что приводило к повышению тактильной чувствительности.
Периферическая маскировка
Отсутствие фасилитации в позднем условии (Late), когда происходил контакт с объектом, может быть объяснено периферической маскировкой. Тактильная информация от контакта с объектом могла маскировать восприятие слабого электрического стимула, предъявленного на тот же палец. Это согласуется с результатами, показывающими, что условие «Позднее без контакта» (Latenc) демонстрировало лучшую перцептивную производительность, чем условие «Позднее» (Late).
Влияние времени/расстояния
Сравнение условий «Раннее», «Среднее» и «Позднее без контакта» (Latenc) не выявило значительной разницы в степени тактильной фасилитации. Это говорит о том, что время или расстояние до контакта с объектом не оказывали существенного влияния на тактильную обработку в рамках данного исследования. Однако, для полного понимания этого аспекта, будущие исследования могут манипулировать скоростью движения объекта.
Заключение
Данное исследование демонстрирует, что тактильная обработка облегчается, а не подавляется, когда человек ожидает получения объекта, даже если он не совершает активных движений для его захвата. Эта фасилитация обусловлена ожиданием тактильного контакта и обратной связи. Периферическая маскировка может играть роль, когда стимул предъявляется непосредственно перед ожидаемым контактом с объектом.
Основные выводы:
- Тактильная фасилитация происходит при приближении объекта к руке.
- Ожидание контакта с объектом является ключевым фактором этой фасилитации.
- Периферическая маскировка может снижать фасилитацию непосредственно перед контактом.
- Отсутствие движения к объекту устраняет типичное тактильное подавление.
Ссылки
[Здесь должны быть ссылки на цитируемые работы, если бы они были представлены в полном объеме.]
Благодарности
Авторы выражают благодарность Аннике Шарка и Брэйлин Гандосси за помощь в сборе данных и Джозефу X. Манзоне за помощь в моделировании перцептивных данных. Поддержка данного исследования была оказана грантами от Совета по естественным наукам и инженерным исследованиям Канады (NSERC) Дэмиану М. Манзоне и Ромео Чуа.
Информация об авторах
Лаборатория перцептивного моторного поведения, Центр моторного контроля, Факультет кинезиологии и физического образования, Университет Торонто, 55 Harbord Street, Toronto, ON, M5S 2W6, Канада
Дамиан М. Манзоне & Люк Трембле
Школа кинезиологии, Университет Британской Колумбии, Ванкувер, Британская Колумбия, Канада
Ромео Чуа
Этические декларации
Конкурирующие интересы: Авторы заявляют об отсутствии конкурирующих интересов.
Дополнительная информация
Примечание издателя: Springer Nature остается нейтральной в отношении юрисдикционных претензий в опубликованных картах и институциональных принадлежностях.
Права и разрешения
Открытый доступ: Данная статья лицензирована в соответствии с Международной лицензией Creative Commons Attribution 4.0, которая разрешает использование, обмен, адаптацию, распространение и воспроизведение на любом носителе или в любом формате, при условии надлежащего указания авторства и источника, предоставления ссылки на лицензию Creative Commons и указания изменений. Изображения или другие материалы третьих сторон, включенные в данную статью, включены в лицензию Creative Commons статьи, если иное не указано в кредитной строке для материала. Если материал не включен в лицензию Creative Commons статьи, и предполагаемое использование не разрешено законодательным положением или выходит за рамки допустимого использования, вам потребуется получить разрешение непосредственно от правообладателя. Для просмотра копии этой лицензии посетите http://creativecommons.org/licenses/by/4.0/.
Цитирование
Manzone, D.M., Tremblay, L. & Chua, R. Tactile facilitation during actual and mere expectation of object reception. Sci Rep 12, 17514 (2022). https://doi.org/10.1038/s4159802222133z





