Интересное сегодня


Введение в социальное поведение рыбок данио
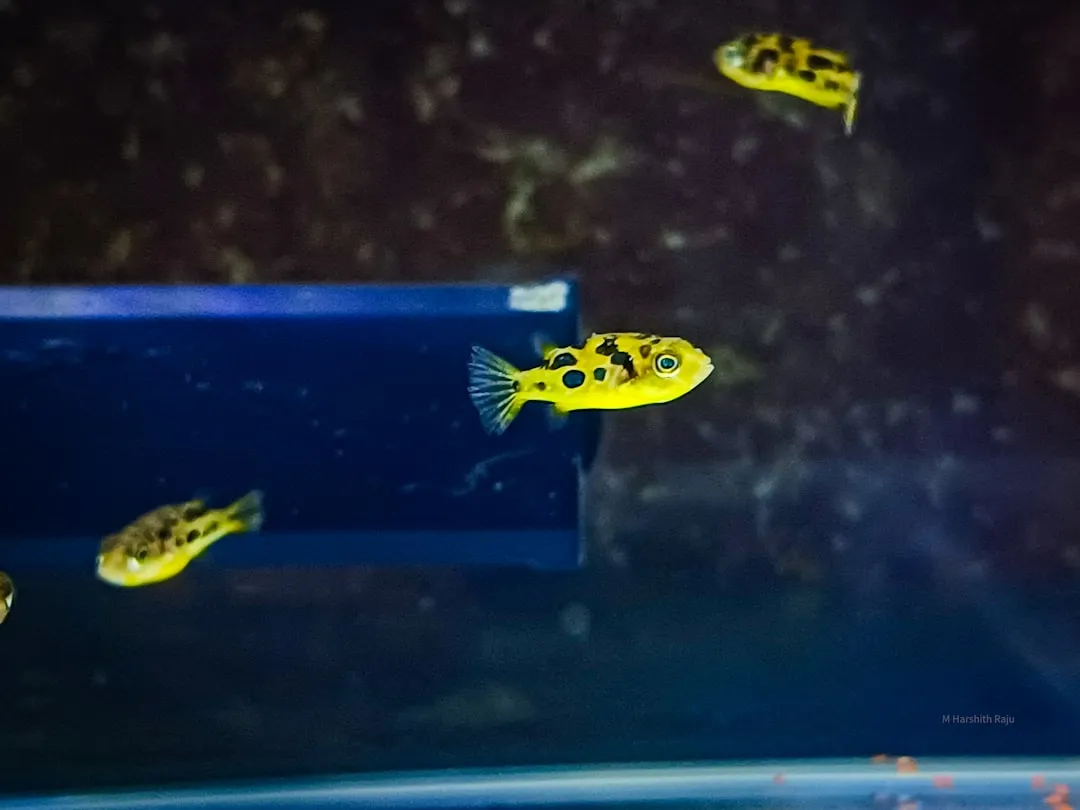
Рыбки данио (Danio rerio) служат животной моделью как в биомедицинских, так и в поведенческих науках. Эти рыбы обладают рядом особенностей, подходящих для биомедицинских исследований, таких как высокая плодовитость, внешнее оплодотворение, быстрое развитие и прозрачность эмбрионов — идеальное сочетание для выявления взаимосвязей между генотипом и фенотипом. Будучи позвоночными, их нервная система структурно больше напоминает человеческую по сравнению с беспозвоночными (например, плодовыми мушками), которые традиционно используются в генетических исследованиях. Это структурное сходство, в свою очередь, делает их неврологические и фармакологические процессы более непосредственно relevantными для человека.
Рыбки данио также обладают способностью к обучению, разделяя общие поведенческие процессы с другими лабораторными видами, включая грызунов, а также человекообразных и нечеловекообразных приматов. Они приобретают непроизвольные условные реакции через классическое обусловливание, когда стимулы predictive (предсказуемы) для пищи, электрического шока и лекарств. Данио также приобретают добровольное поведение через оперантное обусловливание, когда те же стимулы служат последствием поведения. Таким образом, данио обладают высоким потенциалом для служения интерфейсом между биомедицинскими и поведенческими науками, включая изучение социального поведения.
Социальные характеристики рыбок данио
Рыбки данио highly social — при помещении вместе с сородичами они engage (вовлекаются) в стайное поведение (shoaling) и косячное поведение (schooling), часто формируя иерархии within a group. Стайное поведение involves fish remaining physically close to one other. Косячное поведение involves swimming together в одном направлении, что tends to involve более быстрое движение и менее плотную сплоченность, чем стайное поведение, и чаще occurs вскоре после помещения в новую среду, чем позже.
Биологические факторы, как было показано, reduce социальное поведение данио, включая генетически модифицированные модели расстройств аутистического спектра (РАС) и эмбриональное воздействие низких доз этанола. Чтобы лучше понять, как такие нейробиологические изменения влияют на социальное поведение, необходимо определить, как данио generally interact в социальных условиях.
Влияние характеристик сородичей на поведение
Характеристики сородичей (т.е., рыбы-стимула) влияют на поведение экспериментальных данио. При размещении прозрачной перегородки между экспериментальной и стимулирующей рыбой самцы данио showed greater preference к самкам over самцов, но самки приближались к обоим полам similarly. Для этого и последующих исследований предпочтение определялось как относительное время, проведенное в близости между двумя социальными стимулами.
Физический внешний вид сородичей также влиял на предпочтение through computerized manipulations цвета тела, рисунка полос и формы изображений рыбы-стимула. Предпочтение было greater для изображений рыб с неизмененным цветом over красным, желтым over неизмененными изображениями, неизмененных изображений over пиксельно-скремблированных изображений (растянутых, пикселизированных), и не было предпочтения среди различных рисунков полос (неизмененный/горизонтальный против вертикального против безполосого).
Роль движения в социальном поведении
Движение является другой, и более динамичной, характеристикой сородичей, влияющей на социальное поведение. Одно исследование представило роботизированную рыбу-стимул (т.е., модель, прикрепленную к акриловому стержню) и основывало ее трехмерное (3D) движение на предварительно записанной траектории живой данио. Экспериментальные рыбы preferred роботизированную рыбу, когда она двигалась, по сравнению с тем, когда она оставалась статичной. Более того, другое исследование found, что данио preferred видео произвольного стимула (т.е., точки), имитирующего естественное движение данио, over точки, которая двигалась неестественно, хотя рыбы preferred даже больше видео данио, естественно плавающих.
В отличие от естественных взаимодействий among данио, однако, движения рыбы-стимула были независимы от движения экспериментальной рыбы в обоих случаях. Учитывая социальную природу данио, взаимодействия между рыбами, вероятно, являются более динамичными и depend от specific motions, когда рыбы interact.
Эксперимент 1: Предпочтение движения над неподвижностью
Мы исследовали предпочтение между движением, зависимым от движения, неподвижностью и отсутствием рыбы-стимула. Эксперимент 1 был systematic replication предыдущего исследования, в котором данио preferred движущуюся роботизированную рыбу-стимул over ее неподвижный аналог. Мы расширили их исследование в двух отношениях. Во-первых, мы использовали 3D-анимацию рыбы в качестве рыбы-стимула по сравнению с их использованием роботизированной рыбы. Во-вторых, в настоящем эксперименте было arranged, что движение рыбы-стимула depend от specific movements экспериментальной рыбы, но depend только от proximity между двумя рыбами в предыдущем исследовании.
Методы первого эксперимента
Восемь экспериментально наивных данио (4 самца и 4 самки) в возрасте 8-10 месяцев на начало экспериментов served as subjects. Они были дикого типа и не генетически модифицированы. Содержались индивидуально в home aquarium при контролируемых условиях освещения и температуры.
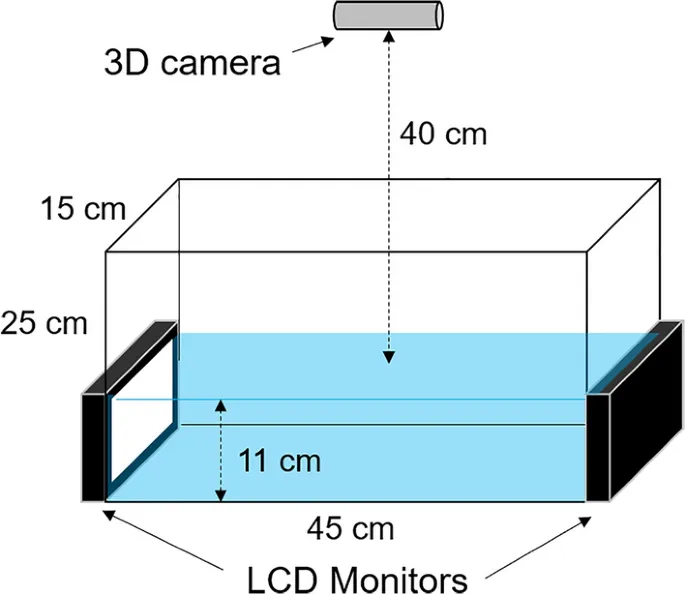
Экспериментальные аквариумы имели стеклянные стенки с каждой стороны и белую пластиковую доску на дне. Два ЖК-монитора покрывали левую и правую стенки аквариума. 3D-камера размещалась над водной поверхностью для отслеживания движения рыбы в реальном времени. Компьютерная программа управляла всеми устройствами и записывала все экспериментальные события.
Социальные стимулы и отслеживание движения
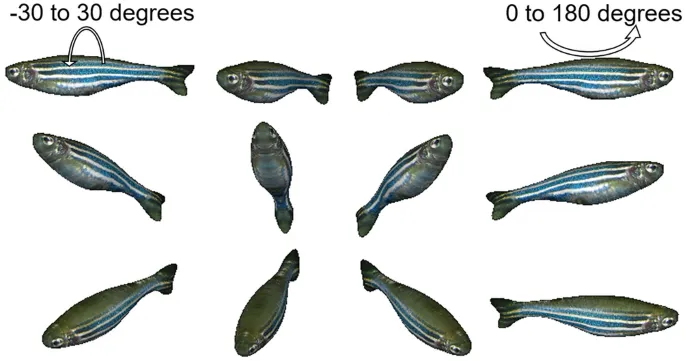
3D компьютерная анимация данио served as социальными стимулами. Фото реальной самки данио было converted в 3D-изображение. Размер тела рыбы-стимула был установлен постоянным на уровне 3 см в длину с бокового view, approximately того же размера, что и экспериментальные рыбы.
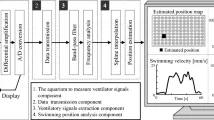
Набор цветных и depth кадров, streaming с камеры, processed для измерения 3D координат рыбы. Два различных алгоритма deep learning одновременно использовались для обнаружения экспериментальной рыбы и ее частей тела на цветных кадрах. Один был YOLO («You only look once» — «Ты смотришь только один раз»), широко используемый алгоритм обнаружения объектов в реальном времени. Другой был DeepLabCut, алгоритм для обнаружения частей тела.
Результаты и обсуждение первого эксперимента
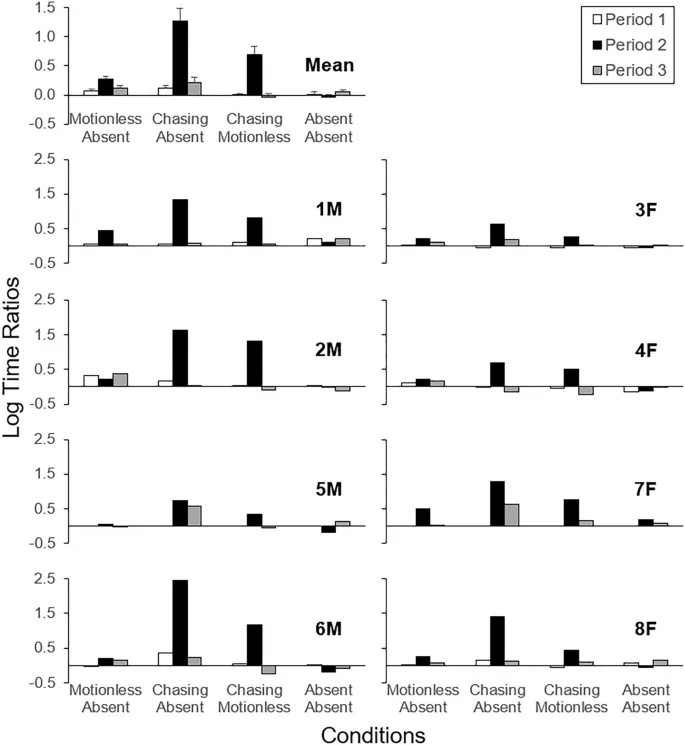
Результаты показали, что данио prefer движение преследования over неподвижный стимул. В условии ChasingvsMotionless все рыбы showed highest log ratios в Периоде 2, indicating preference для движения преследования over неподвижного. Численно, arithmetic mean log time ratio составил 0.70 в Периоде 2 условия ChasingvsMotionless. Его antilog (5.02) indicated, что, в среднем, данио preferred движение преследования approximately в пять раз больше, чем неподвижную рыбу.
Настоящие результаты были consistent с finding в предыдущем исследовании, что данио preferred рыбу-стимул, engaging в движении, over неподвижную рыбу, despite различия в экспериментальных стимулах и процедуре. Использование анимированной 3D-рыбы может быть useful для будущих исследований социального поведения данио, так как это eliminates любые неестественные звуки, resulting от механики роботизированных рыб, и offers более широкое variety возможных движений.
Эксперимент 2: Сравнение различных типов зависимого движения
Эксперимент 1 продемонстрировал strong preference для рыбы-стимула, engaging в движении преследования, dependent от движения экспериментальной рыбы, по сравнению с неподвижной рыбой-стимулом. В настоящем эксперименте мы addressed две основные цели, исследуя различные аспекты зависимости между движениями экспериментальной и стимулирующей рыбы.
Цели второго эксперимента
Первая цель consisted в том, чтобы examine, как вариации типа зависимого движения (например, преследование против бегства) влияют на предпочтение социальных стимулов. Вторая цель consisted в том, чтобы examine effects зависимости движения на предпочтение путем maintaining versus removing зависимости.
Для второй цели предыдущее исследование не found clear effects зависимости движения при корреляции частоты взмахов хвоста роботизированной рыбы с расстоянием между экспериментальной и роботизированной рыбой. Однако роботизированное биение хвоста might have introduced другие факторы, making it challenging изолировать роль зависимости. Поэтому настоящий эксперимент использовал 3D анимированную рыбу-стимул для examination, contributes ли зависимость движения к предпочтению социальных стимулов.
Методы второго эксперимента
Те же восемь данио served в этом эксперименте. Аппаратура была как описана в первом эксперименте. Общие features экспериментальной процедуры были как в первом эксперименте.
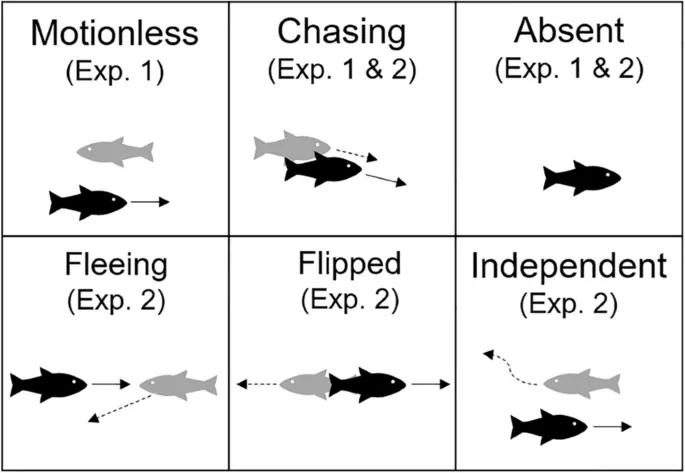
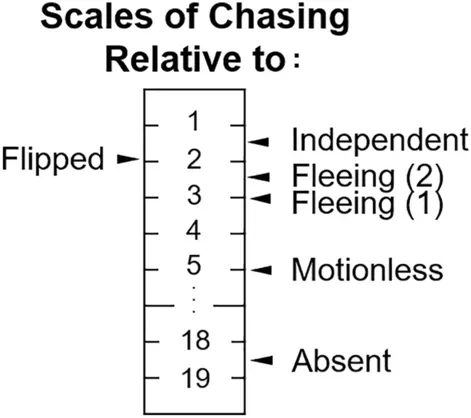
Были использованы пять типов стимулов: преследование (Chasing), отсутствие (Absent), бегство (Fleeing), зеркальное отображение (Flipped) и независимое движение (Independent). В условии бегства рыба-стимул moved away от экспериментальной рыбы. В условии зеркального отображения это было mirror image движения преследования. В условии независимого движения рыба-стимул moved independently от движения экспериментальной рыбы.
Результаты и обсуждение второго эксперимента
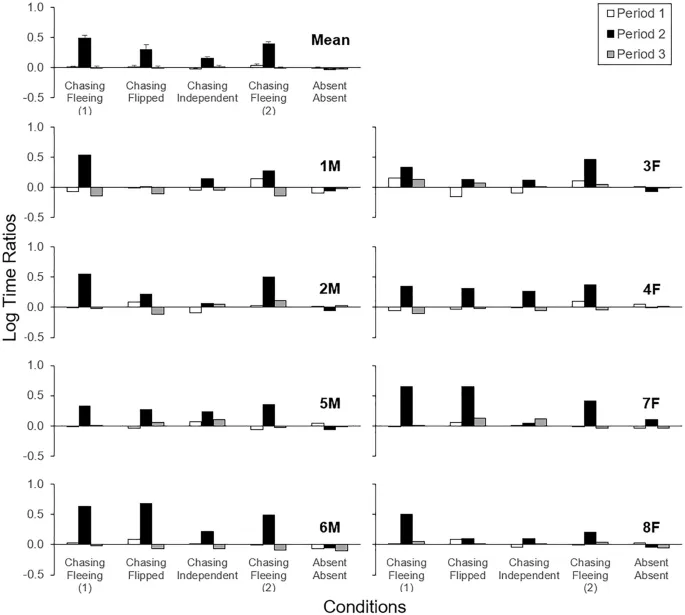
Результаты indicate, что данио prefer определенные dependent движения сородичей over другим. В частности, преследование было preferred over как зеркальное отображение, так и, в большей степени, движение бегства. Зеркальное движение differed от движения преследования only в направлении движения рыбы-стимула по отношению к движению экспериментальной рыбы, thereby контролируя многие потенциальные количественные различия в движении рыбы-стимула.
Этот эксперимент provided strongest evidence reinforcing effect зависимости между движениями экспериментальной и стимулирующей рыбы на предпочтение социальных стимулов у данио. Многочисленные различия в методах могли способствовать различным findings между экспериментами.
Общее обсуждение результатов исследования
Настоящее исследование examined, как зависимость между движением экспериментальной и стимулирующей рыбы contributed к предпочтению у данио. Эксперимент 1 showed, что данио preferred движущегося сородича (т.е., преследующего) over отсутствие движения (т.е., неподвижного). Эксперимент 2 revealed предпочтение зависимости между движением экспериментальной и стимулирующей рыбы over движениям, независимым от экспериментальной рыбы.
Наконец, мы found greater preference для движения преследования over других форм зависимого движения (бегство, зеркальное отображение). Взятые together, эти эксперименты indicate предпочтение тому, что можно назвать «интерактивными» социальными стимулами. Эти отношения became evident путем использования 3D-анимации данио, которая имеет potential для организации wide variety социальных стимулов и зависимостей.
Расширение предыдущих исследований
Настоящее исследование extended предыдущие findings движения рыбы-стимула на предпочтение несколькими способами. Во-первых, оно provided первые доказательства того, что зависимость движения у сородичей contributes к предпочтению у данио. Во-вторых, настоящее исследование indicated, что предпочтение может vary depend от типа зависимого движения.
Влияние оперантного обусловливания
Важным implication настоящего исследования было то, что оперантное обусловливание might underlie предпочтение социальных стимулов. В типичных процедурах оперантного обусловливания экспериментальные субъекты engage в дискретных responses, resulting в доступе к некоторому outcome. Подобно настоящим findings с социальными стимулами, несколько видов showed больше responses в присутствии зависимости response-food, чем в его absence.
Альтернативные объяснения и ограничения
Альтернативное explanation для многих findings предпочтения, включая настоящие данные, заключается в том, что increased proximity к одному стимулу over другому could reflect неассоциативные процессы, rather than оперантное обусловливание. Процедуры, используемые в настоящих экспериментах, differ от типичных процедур оперантного обусловливания.
Одно ограничение настоящего исследования relates к интерпретации time ratio как index предпочтения. Величина относительного предпочтения would most likely change, например, при изменении длины аквариума. Таким образом, исследователи должны always consider переменные within экспериментальной setup при интерпретации количественных мер предпочтения.
Перспективы будущих исследований
Настоящий метод 3D-анимации имеет potential для дальнейшего examination процессов, лежащих в основе социального поведения у данио. Одна самка рыбы-стимула была presented на мониторе в настоящем исследовании, но это может быть easily extended до самцов данио, хищных рыб или нескольких рыб-стимулов.
Манипулируя размером стаи, предыдущее исследование showed, что самки данио preferred larger стаи smaller, независимо от состава самцов и самок, тогда как самцы showed no preference. Используя настоящий метод, несколько рыб-стимулов могли бы быть presented simultaneously, имея движение каждой отдельной рыбы dependent от движения экспериментальной рыбы, чтобы examine не только стайное поведение, но и косячное.
Кроме того, степень синхронизации между движениями косячных рыб также могла бы быть precisely manipulated с использованием 3D-анимации. Эти экспериментальные manipulations были not possible в предыдущих исследованиях с использованием предварительно записанных видео или роботизированных рыб.