Интересное сегодня


Введение: Как мы определяем местоположение наших рук?
Как мы узнаем, где находятся наши руки в пространстве? Сенсорные сигналы, такие как зрение и проприоцепция (ощущение положения собственного тела), сообщают о положении руки. Эти сигналы необходимо интегрировать, чтобы получить окончательную оценку местоположения руки. Для изучения механизмов интеграции в адаптационных экспериментах применяется искусственное пространственное несоответствие между зрением и проприоцепцией. Первым и самым известным примером визуомоторной адаптации является адаптация к призмам. Ношение призматических очков, которые смещают зрение на определенную величину, приводит, когда очки снимаются, к адаптационным последействиям, таким что испытуемые неправильно тянутся к объектам. Другими словами, после многократного воздействия несоответствия рука участника кажется расположенной ближе к ложному визуальному сигналу.
Цель визуомоторной адаптации и обработка ошибок
Цель визуомоторной адаптации — минимизировать ошибку между конечным местоположением движения руки и целевым объектом. Ошибки конечной точки в задачах указания или достижения могут возникать из-за смещения цели во время выполнения движения или из-за шума выполнения, приводящего к неточному движению. Отдельные механизмы контролируют обработку ошибок обоих сигналов. Исследования с визуализацией мозга человека в основном сообщают, что корковая обработка ошибок происходит в теменных областях. Однако исследование на обезьянах предоставило доказательства того, что моторная и премоторная кора кодируют информацию об ошибках конечной точки при достижении. Эти сигналы могут вызывать изменения в мозжечке, который незаменим для успешной адаптации.
Альтернативное объяснение и роль активного вывода
Однако несоответствие между зрением и проприоцепцией в ошибках конечной точки достижения также может быть разрешено путем смещения визуального сигнала положения руки в сторону проприоцептивного сигнала. Исследования, изучающие активные движения руки, рассмотрели этот вопрос, прося испытуемых оценить положение курсора после того, как они адаптировались к визуомоторному вращению. Действительно, было обнаружено смещение курсора в сторону ощущаемого положения руки. Однако визуальное смещение оставалось меньшим, чем проприоцептивное. Стандартное объяснение более сильного смещения в проприоцепции обычно объясняется в рамках оптимальной интеграции. С этой точки зрения, зрение является доминирующим чувством в отношении пространства, поскольку оно наименее изменчиво. Если визуальные и проприоцептивные сигналы интегрированы оптимальным образом, каждый будет взвешиваться по своей собственной неопределенности. Этот байесовский принцип предсказывает смещение более изменчивого чувства в сторону более точного, как это обнаруживается в проприоцептивном дрейфе. Однако в отличие от этого объяснения, исследования сообщали об отсутствии корреляции между проприоцептивным смещением и проприоцептивной изменчивостью, чего следовало бы ожидать, если бы байесовская модель объясняла визуомоторную адаптацию.
Альтернативное объяснение более сильного смещения в проприоцепции по сравнению со зрением может заключаться в экспериментальном построении искусственной ошибки.
Методология исследования
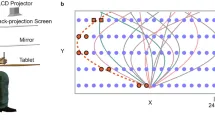
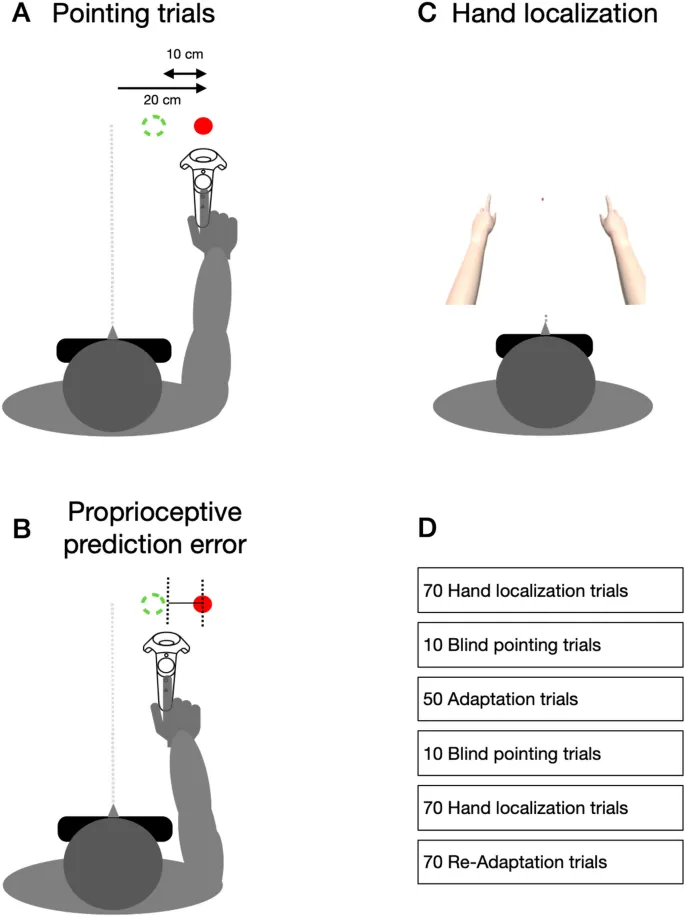
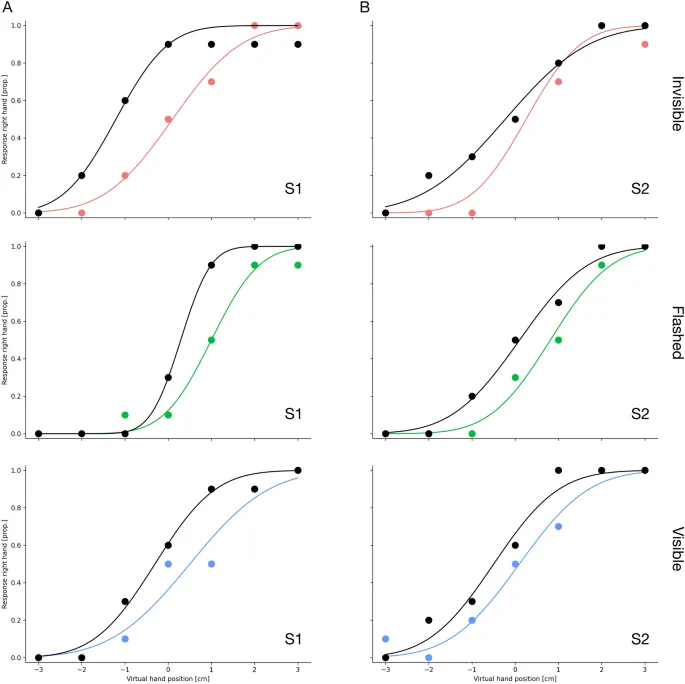
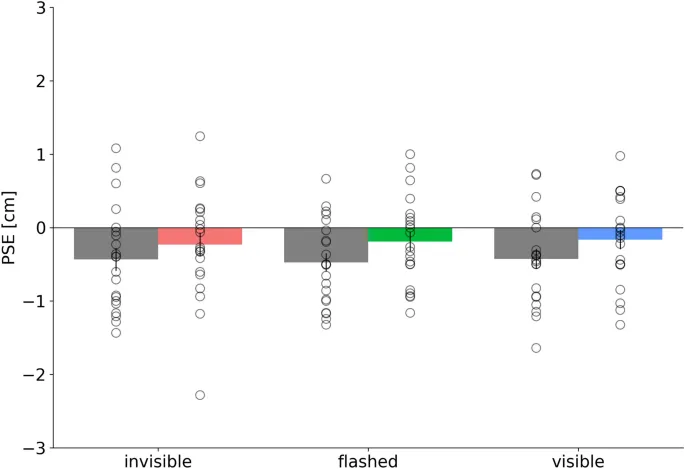
В настоящем исследовании мы создали несоответствие между predicted (предсказанным) проприоцептивным положением при достижении цели и фактическим проприоцептивным положением, когда предоставлялась тактильная обратная связь. Участники получали вибрацию на указательном пальце, когда они указывали на кратковременно мелькающую визуальную цель, представленную в шлеме виртуальной реальности. В базовых trials (пробах) участники получали вибрацию, когда положение их пальца соответствовало положению, где была показана цель. Во время адаптации вибрация представлялась shortly before (незадолго до) того, как рука достигала местоположения цели. Пространственное смещение постепенно увеличивалось по trials, пока не достигало 10 см. В отдельных сессиях мы также варьировали certainty (уверенность) визуальной руки. Мы либо показывали визуальную руку в течение всего движения, либо briefly flashed (кратковременно показывали) ее только в середине движения, либо не показывали вообще. Чтобы оценить воспринимаемое визуальное местоположение руки, мы просили participants (участников) до и после адаптации сравнить визуальное местоположение виртуальных рук, мелькающих в левой и правой периферии.
Эксперимент 1: Активное указание с perturbation (возмущением)
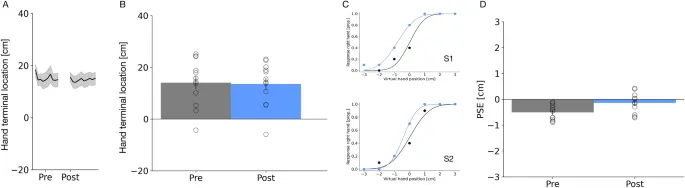
В Эксперименте 1 от subjects (испытуемых) требовалось указать на визуальную цель, которая кратковременно мелькала. Как только они достигали положения цели, тактильная обратная связь предоставлялась посредством вибрации в handheld controller (ручном контроллере). В adaptation trials (пробах на адаптацию) вибрация представлялась до того, как рука прибывала в местоположение цели. Расстояние между местоположением цели и позицией, где предоставлялась вибрация, увеличивалось в течение 10 trials, пока не достигало 10 см.
Чтобы проверить aftereffects (последействия) адаптации указания, до и после адаптации мы измеряли производительность указания в blind pointing trials (пробах слепого указания). В этих trials не предоставлялась тактильная обратная связь об успешности движения. Для каждого участника мы selected (отобрали) пробы слепого указания, измеренные до и после адаптации (по 10 trials каждый), и вычислили linear mixed models (LMM, линейные смешанные модели).
Анализ пиковых скоростей
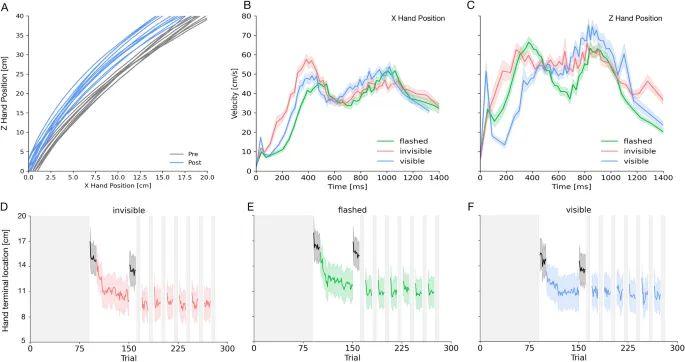
В принципе, participants могли бы решить задачу указания, просто двигая рукой до тех пор, пока не получат тактильный импульс, а затем немедленно останавливаться. Чтобы оценить, использовали ли subjects эту стратегию или whether они выполняли goal-directed (целенаправленные) движения указания, мы проанализировали peak velocities (пиковые скорости) trajectories (траекторий) указания. Результаты LMM показали, что пиковые скорости были lower in the post compared to the pre adaptation trials (ниже в trials после адаптации по сравнению с trials до адаптации).
Визуальная локализация руки
Затем мы спросили, как адаптация движений указания повлияет на visual perception (визуальное восприятие) рук. Для этого мы implemented (реализовали) trials локализации руки, в которых subjects должны были направлять взгляд на fixation point (точку фиксации). Две руки одновременно представлялись слева и справа в течение 100 мс. Subjects должны были решить, какая рука казалась ближе к midsagittal plane (срединно-сагиттальной плоскости).
Эксперимент 2: Активное указание без возмущения
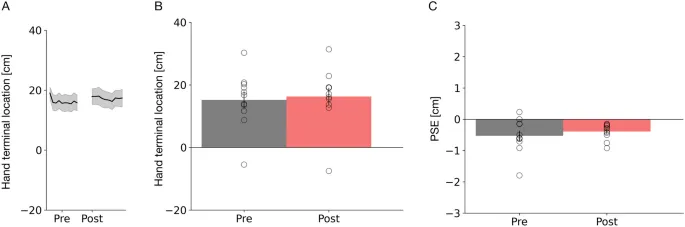
Чтобы подтвердить, что изменения в слепом указании и в визуальной локализации руки связаны с adaptive shift (адаптационным смещением), а не с другими факторами, мы повторили Эксперимент 1 с тем лишь исключением, что тактильная вибрация всегда представлялась, когда рука достигала местоположения цели. Другими словами, адаптационное смещение не применялось.
Эксперимент 3: Активное указание с возмущением — тестирование проприоцепции
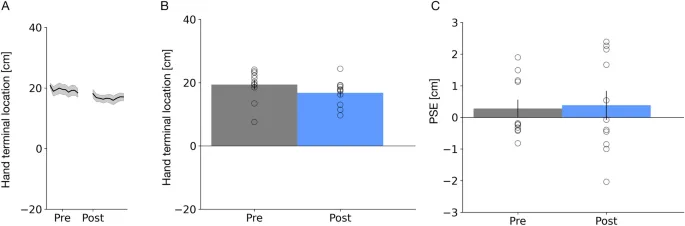
В Эксперименте 3 мы проверили, повлияет ли наш protocol (протокол) адаптации на проприоцептивно ощущаемое местоположение руки. Мы повторили структуру trials Эксперимента 1, включая adaptive shift в adaptation trials.
Эксперимент 4: Пассивное наблюдение указания
Поскольку в Эксперименте 1 мы обнаружили значительное mislocalization (неправильное определение местоположения) правой руки outward (кнаружи), нам стало интересно, может ли mere observation (простое наблюдение) за движущейся визуальной руки быть достаточным для создания смещения в визуальном местоположении руки. В Эксперименте 4 participants тестировались в пассивной версии этой парадигмы, в которой, в adaptation trials, они наблюдали, как визуальная рука двигается автоматически.
Обсуждение результатов
В этом исследовании мы создали новую парадигму визуомоторной адаптации, в которой сигнал ошибки состоял в искусственном несоответствии между expected (ожидаемым) и actual (фактическим) положением тактильной обратной связи при достижении целевого местоположения. Участники тянулись к запомненному положению визуальной цели, где они ожидали получить тактильную обратную связь. Однако в adaptation trials мы смещали местоположение, в котором предоставлялась тактильная обратная связь, на более раннюю точку trajectory (траектории) движения. В результате participants адаптировались к неправильной обратной связи и выполняли более короткие trajectories движения.
Мы обнаружили, что participants воспринимали визуальную руку смещенной в направлении, противоположном искусственному смещению и противоположном адаптационному смещению в указании. Ни изменение в слепом указании, ни визуальное смещение в воспринимаемом положении руки не могут быть attributed (приписаны) простому дрейфу, произошедшему из-за prolonged exposure (продолжительного воздействия) темной среды или другим факторам, не связанным с адаптивной обратной связью.
Механизм адаптации указания, driven by (управляемый) sensory prediction errors (ошибками сенсорного предсказания), можно отличить от механизма, управляемого reward prediction errors (ошибками предсказания вознаграждения).
В Эксперименте 4 мы обнаружили, что mere observation (простое наблюдение) за движением руки также достаточно для вызова адаптивных изменений в слепом указании и в пространственном визуальном восприятии руки. Участники смотрели recordings (записи) движений рук, оставаясь пассивными. Смещение в кажущемся положении руки thus occurs (таким образом, происходит), когда participants активно двигают руками или когда они пассивно наблюдают за рукой, движущейся в шлеме виртуальной реальности.
Заключение и выводы
Восприятие частей тела, особенно конечностей, тесно связано с движениями, которые они будут выполнять. Например, визуальные манипуляции с размером руки modify (изменяют) trajectory движения, которое выполняется этой рукой. Появление руки thus constantly updates (таким образом, постоянно обновляет) планирование движения. Мы показываем, что обратное также верно: ожидание движения изменяет то, где рука, кажется, находится. Если восприятие рук очень uncertain (неопределенно), сенсомоторные predictions (предсказания) могут смещать пространственные оценки визуального местоположения руки.
Мы создали несоответствие между видимым положением цели указания и местоположением, в котором была получена тактильная обратная связь. Наши данные показывают, что мозг компенсирует этот конфликт, смещая кажущееся положение руки в сторону местоположения цели. В отличие от предыдущих визуомоторных парадигм, в которых смещалась либо визуальная цель, либо визуальный курсор, указывающий положение руки, мы манипулировали тактильной обратной связью. Поскольку тактильная обратная связь указывала на то, что рука успешно достигла цели, мозг должен разрешить пространственное несоответствие между проприоцептивно указанным местоположением цели и восприятием руки. Смещения в визуальном местоположении руки после наблюдения моторной адаптации further confirm (дополнительно подтверждают), что несоответствие между конечным положением руки в trials указания и проприоцептивно ощущаемым положением цели является движущей силой смещения в визуальном местоположении руки.
В заключение, наше исследование показывает, что визуальные смещения в местоположении руки следуют за пространственной адаптацией движений указания, когда возникает несоответствие между predicted (предсказанным) и проприоцептивно ощущаемым местоположением цели.





