Интересное сегодня
Сравнение методов измерения силы при восприятии веса: платформа против рукоятки
Введение
Силы, которые мы прилагаем при захвате и подъеме объектов, играют важную роль в понимании восприятия веса и иллюзии размера-веса (SWI) — явления, при котором меньший из двух одинаково весящих объектов воспринимается как более тяжелый (Charpentier, 1886, 1891). Эти силы используются как прокси-мера наших априорных, или неявных, ожиданий относительно веса объектов, при этом большее начальное приложение силы связано с большим ожиданием массы объекта (Chouinard et al., 2005). Данные о силе были инструментальными не только в исследовании того, влияет ли само применение силы на восприятие веса или, альтернативно, адаптируется ли оно со временем (например, Davis, 1973; Flanagan & Beltzner, 2000; Grandy & Westwood, 2006; Granit, 1972), но и в практических аспектах, например, в подтверждении соблюдения участниками инструкций по заданию, таких как подъем стимулов по прямой вертикальной траектории, чтобы избежать смешивающих переменных, связанных с крутящим моментом (Flanagan & Beltzner, 2000). Учитывая, насколько широко и влиятельно стали данные о силе в исследовании восприятия веса и связанных с ним явлений, способы получения этих данных и сравнение различных методов имеют значение для результатов исследований и поэтому заслуживают тщательного рассмотрения.
Методы измерения силы
Метод с использованием рукоятки
Во многих исследованиях данные о силе получаются с помощью шестиосевых датчиков силы-момента, встроенных в рукоятку, которая помещается на вершину стимула и зажимается между большим и указательным пальцами прищипком для подъема объекта (Chang et al., 2008; Chouinard et al., 2009; Engel et al., 2020; Flanagan & Beltzner, 2000; Green et al., 2010; Mon-Williams & Murray, 2000). Эти датчики регистрируют силы и моменты, прилагаемые по трем измерениям, из которых обычно выводятся два основных типа данных: сила сжатия (grip force), горизонтальная сила, прилагаемая для стабилизации объекта, и сила нагрузки (load force), вертикальная сила, прилагаемая для преодоления массы объекта во время подъема. Хотя это эффективный, стандартный метод фиксации данных о силе, он не лишен ограничений. Например, одно ключевое ограничение установок на основе рукояток заключается в том, что они требуют точного захвата, ограничивая взаимодействие участников с объектом. Это ограничение сужает обобщаемость результатов до более естественных форм взаимодействия с объектами, таких как замкнутые захваты, которые распространены в повседневных условиях.
Логистические и технические недостатки
Существуют также логистические недостатки. Если исследователи хотят использовать большое количество или диапазон стимулов, это может потребовать инвестиций в соответствующее количество датчиков, что может быстро стать дорогостоящим. Хотя датчики можно менять между объектами между пробами, этот процесс может нарушить экспериментальный поток, увеличить продолжительность между пробами и сократить общее количество проб, которые могут быть проведены в заданное время. Кроме того, этот обмен создает возможность экспериментальной ошибки, например, некорректного повторного подключения, которого можно было бы избежать. Каждая из этих проблем может быть сведена к минимуму при использовании платформы с фиксированным датчиком, поскольку обмен между стимулами не требуется, хотя все же следует позаботиться о том, чтобы объекты были размещены по центру. Хотя частоту таких ошибок трудно определить, учитывая, что они редко подробно сообщаются, их потенциальное влияние на качество данных в сочетании с уменьшением экспериментальной нагрузки может оправдать этот компромисс в исследованиях, где данные о силе сжатия не имеют существенного значения.
Метод с использованием платформы
Однако был использован альтернативный подход, при котором датчики силы встроены в платформу, с которой поднимаются стимулы (Baugh et al., 2016; Flanagan et al., 2008; Trewartha & Flanagan, 2017). Когда объекты поднимаются с платформы, датчики обнаруживают уменьшение силы, действующей вниз на платформу, соответствующее удалению веса объекта во время подъема. В отличие от рукояток, этот метод обеспечивает большую гибкость в поведении при подъеме и стратегиях обращения, расширяя сферу потенциальных применений. Однако, как и в случае с рукоятками, метод платформы имеет свои ограничения.
Сравнение методов: возможности и ограничения
Отсутствие данных о силе сжатия при использовании платформы
Одно явное различие между рукоятками и платформой заключается в том, что первые позволяют собирать данные о силе сжатия, а вторые — нет. Измерения силы сжатия широко представлены в литературе, причем до двух третей исследований SWI включают некоторую форму данных о силе сжатия (Harris et al., 2024). Однако некоторые исследования фокусируются исключительно на силе нагрузки, поскольку она напрямую отражает вертикальную силу, прилагаемую для противодействия гравитации и подъема объекта, и поэтому часто считается более прямым показателем сенсомоторных прогнозов участников относительно веса объекта (Flanagan et al., 2001, 2008). При наличии данные о силе сжатия часто объединяются с данными о силе нагрузки для оценки как ожиданий массы объекта (например, упреждающее масштабирование силы сжатия), так и адаптации к этой массе (например, Buckingham & Goodale, 2010; Flanagan & Beltzner, 2000). Таким образом, данные о силе сжатия служат двум важным целям. Во-первых, они позволяют более тонко изучить сенсомоторные процессы, участвующие в подъеме объектов, например, предоставляя дополнительную информацию, такую как стабилизация объекта. Во-вторых, они предлагают конвергентные доказательства при объединении с данными о силе нагрузки, что может повысить уверенность в сделанных выводах. Без доступа к таким измерениям, как сила сжатия, интерпретации могут стать более ограниченными или менее точными. Тем не менее, установка платформы позволяет собирать данные о силе нагрузки во время подъемов с использованием более широкого спектра типов захвата — взаимодействий, которые в противном случае исключили бы любое измерение силы в конструкциях на основе рукояток.
Проблемы с регистрацией пиковой силы
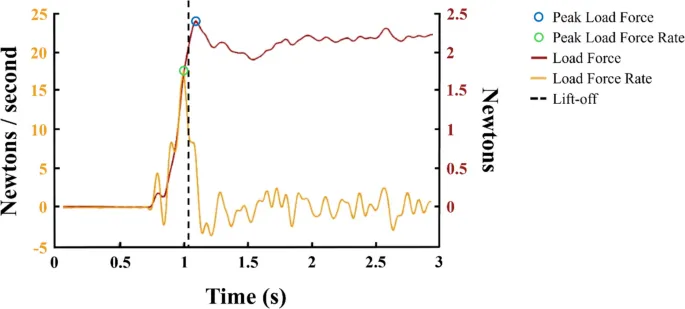
Поскольку метод на основе платформы фиксирует только силы нагрузки, обеспечение сопоставимости качества и интерпретируемости этих данных с данными, полученными с помощью рукояток, становится особенно важным. Можно разумно предположить, что приложение силы нагрузки к объекту будет сопровождаться эквивалентным уменьшением силы нагрузки, измеренной платформой, но степень этого соответствия неясна. Например, при использовании метода платформы также может происходить потеря данных, поскольку он может измерять данные о силе только до момента отрыва. В некоторых случаях, например, когда объекты легче, чем ожидалось, максимальное приложение силы может произойти за пределами точки отрыва, вне окна записи платформы. Хотя пиковая скорость силы нагрузки имеет тенденцию происходить немного раньше и может быть зафиксирована, ее близость к точке отрыва увеличивает риск того, что она будет зафиксирована лишь частично, что делает определение истинного пика менее точным (Рис. 1; Baugh et al., 2016; Harris et al., 2024; Saccone et al., 2019; Trewartha & Flanagan, 2017).

Использование «первого пика» вместо «пика»
Однако «пиковые» измерения (т. е. пиковая сила и пиковая скорость силы) обычно не используются в исследованиях на основе платформы, которые вместо этого предпочитают меры «первого пика», которые идентифицируют силу при первом пике скорости силы — иными словами, силу, которая прилагается к объекту в момент наибольшего изменения приложенной силы (Baugh et al., 2016; Flanagan et al., 2008; Trewartha & Flanagan, 2017). Хотя как пиковые, так и меры первого пика использовались для оценки сенсомоторных прогнозов (например, Baugh et al., 2016; Buckingham & Goodale, 2010; Flanagan et al., 2008; Harris et al., 2024), они могут отражать разные аспекты обработки. Чтобы объяснить это, в зависимости от того, как выбираются эти меры, они могут исходить из первоначального приложения силы, до корректировки, или после, фиксируя некоторую степень изменений в первоначальном выборе силы. На практике они дают представление об общем приложении силы при взаимодействии с объектами и о том, как это связано с восприятием веса (Flanagan & Beltzner, 2000). В сравнении, меры силы при первом пике считаются индексом первоначального прогноза веса объекта, фокусируясь на том, как силы применяются до повторной калибровки из-за сенсомоторной обратной связи (Baugh et al., 2016; Flanagan et al., 2008). Таким образом, эта мера изолирует упреждающий ответ от корректирующих действий, давая представление о первоначальной оценке веса испытуемым. Поскольку эти меры имеют разные последствия для сенсомоторного процесса и интерпретации результатов и зависят от различной продолжительности захвата данных, важно также оценить, как платформа сравнивается с рукоятками в получении обоих типов данных.
Цель исследования
Учитывая ценность данных о силе в экспериментах по восприятию веса, возникает необходимость в альтернативном методе сбора данных, когда рукоятка с датчиком силы непрактична или нежелательна. Однако остается необходимым определить, как она сравнивается с более устоявшимся методом на основе рукояток. Поэтому мы поставили целью оценить достоверность платформы со встроенным датчиком силы в качестве альтернативы традиционной рукоятке. В частности, мы сравнили платформу с рукояткой с точки зрения конкурентной валидности — степени, в которой данные о силе нагрузки платформы соответствовали данным, зарегистрированным рукояткой, — и конвергентной валидности — воспроизвела ли платформа, когда объекты поднимались непосредственно с нее без рукоятки, экспериментальные результаты, согласующиеся с наблюдаемыми с использованием метода на основе рукоятки.
Экспериментальный дизайн
Эксперимент 1: Подъем объектов с рукоятками
Для достижения этой цели мы провели два эксперимента, в которых объекты поднимались либо с помощью рукоятки, прикрепленной к платформе (Эксперимент 1), либо непосредственно рукой с платформы (Эксперимент 2). В Эксперименте 1 данные одновременно регистрировались обоими устройствами, что позволило напрямую сравнить данные о силе, фиксируемые рукояткой и платформой. В Эксперименте 2 участники поднимали те же объекты непосредственно с платформы, без рукояток, что позволило нам оценить, отличаются ли результаты в результате метода подъема. Сравнение результатов между экспериментами, таким образом, позволило нам оценить, влияет ли способ использования платформы — либо через рукоятку, либо прямой подъем — на перцептивные и сенсомоторные результаты, которые она производит.
Эксперимент 2: Подъем объектов непосредственно рукой
Каждый эксперимент включал два манипуляционных фактора: вес объекта (легкий или тяжелый) и порядок предъявления, при котором стимулы либо менялись (подъем тяжелого после легкого или легкого после тяжелого), либо не менялись (подъем легкого после легкого или тяжелого после тяжелого). Известно, что эти манипуляции вызывают надежные и высоковоспроизводимые сенсомоторные эффекты, при которых прилагается меньше силы при подъеме тяжелого объекта после легкого, в результате чего тяжелый объект воспринимается как более тяжелый, и наоборот (Chouinard et al., 2005; Harris et al., 2024; Maiello et al., 2018; van Polanen & Davare, 2015). Эти хорошо зарекомендовавшие себя эффекты послужили надежной и чувствительной основой для оценки платформы.
Методология
Участники
В исследовании приняли участие 29 человек (7 мужчин, 22 женщины; средний возраст = 25,6 лет, диапазон = 18–42 года), которые получили компенсацию в виде подарочных карт. Все участники дали информированное письменное согласие на участие и сообщили, что не принимали никаких лекарств, вызывающих сонливость, и не имели психологических, неврологических и психиатрических расстройств. Эти критерии исключения были введены для того, чтобы наша выборка отражала здоровое функционирование мозга. Все участники были правшами, что подтверждено Опросником праворукости Флиндерса (Flinders Handedness Survey) (Nicholls et al., 2013), и имели нормальное или скорректированное до нормального зрение, что подтверждено результатами теста на таблице Снеллена и тестом на стереоактивность Random Dot 3 s (Vision Assessment Corporation, IL, USA).
Стимулы

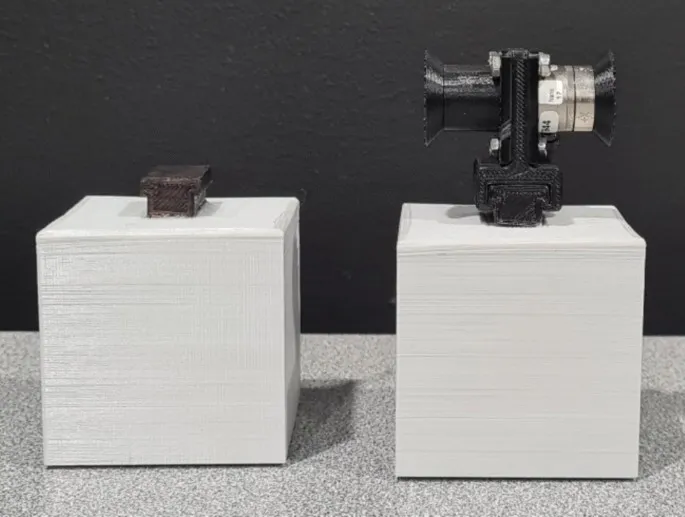
Мы использовали два трехмерных (3D) печатных полых куба, оба серого цвета и размером 6 см × 6 см × 6 см, объемом 216 см³ (см. Рис. 2). К середине верхней поверхности каждого куба была прикреплена небольшая петля, позволяющая надежно закрепить рукоятки датчика силы. Кубы были заполнены свинцовой дробью, в результате чего их вес составил 125 г (легкий) и 518 г (тяжелый) с плотностью 0,58 г/см³ и 2,40 г/см³ соответственно. Были предприняты меры предосторожности для размещения свинцовой дроби в геометрическом центре объектов, чтобы уменьшить влияние распределения массы на воспринимаемый вес объектов (Amazeen & Turvey, 1996; Harris & Chouinard, 2023).
Аппаратура
Датчики силы и рукоятки
Данные о силе регистрировались со скоростью 400 Гц с использованием датчиков силы-момента Nano17 F/T (ATI Industrial Automation, Garner, NC, USA), прикрепленных как к рукояткам кубов, так и к платформе. Датчики на рукоятках измеряли силу и момент, прилагаемые по осям X, Y и Z указательным пальцем во время подъема. Следует отметить, что сила, регистрируемая рукояткой, представляет собой половину общей приложенной силы, поскольку сила, приложенная большим пальцем, не измерялась.
Платформа с датчиком силы

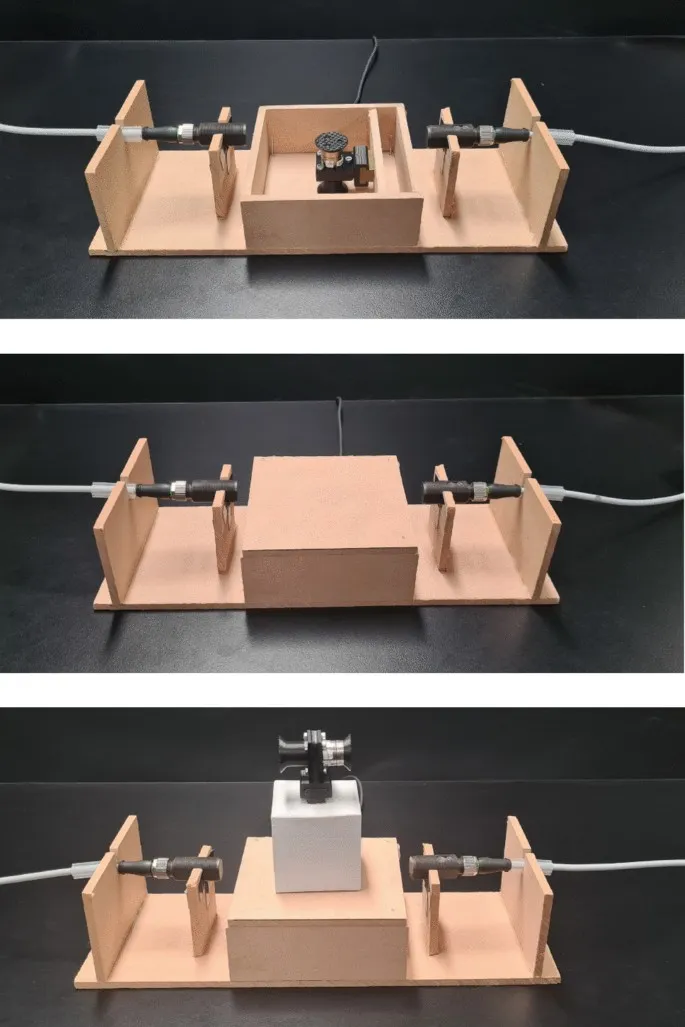
Как видно на Рис. 3, деревянный ящик размером 10 см × 10 см × 6 см служил основанием платформы. В основании платформы была закреплена короткая деревянная планка, на которую был установлен штифт. Он был расположен таким образом, что при закреплении датчика силы на штифте он надежно располагался по центру платформы. Датчик был ориентирован осью Z вертикально, то есть по направлению прилагаемой силы при подъеме объекта. Сверху на платформу и датчик опиралась деревянная крышка размером 10 см × 10 см × 0,6 см. Для предотвращения бокового смещения крышки при размещении на ней объектов в каждом углу были вбиты небольшие гвозди примерно на 0,8 см по диагонали внутрь. Эти гвозди не касались стенок или основания платформы и не удерживали крышку, поэтому не влияли на зарегистрированные данные о силе; они просто действовали как ограничители бокового смещения. Были предприняты меры предосторожности для обеспечения ровности платформы и крышки, а также плотного прилегания основания к опорной поверхности. На нижние углы крышки были прикреплены небольшие клейкие пенопластовые подушечки; они были подобраны по размеру и расположены так, чтобы не принимать на себя вес объекта и не мешать считыванию силы во время подъема, что было подтверждено в процессе прототипирования платформы. Они были включены исключительно в качестве меры предосторожности для защиты датчика от потенциального повреждения при резком или нецентральном размещении объектов.
Световые датчики
Для точного определения момента отрыва объекта по бокам платформы были установлены световые датчики. Эти датчики были установлены на тонких деревянных планках, каждая из которых имела вырез, позволяющий датчикам располагаться чуть выше поверхности крышки. Датчики были расположены примерно в 2 см от края платформы, чтобы гарантировать, что участники случайно не заденут их при возвращении объектов на место.
Ограничения конструкции платформы
Следует также отметить, что использованная здесь платформа представляет собой одну из возможных конструкций платформы со встроенным датчиком силы. Другие конструкции платформы могут отличаться по своим механическим характеристикам, и определенные соображения могут не применяться или применяться иначе к альтернативным конструкциям. Например, если бы крышка была прикреплена непосредственно к датчику, потенциальные соображения, связанные с движением крышки, могли бы быть смягчены, хотя такой подход мог бы создать практические трудности, особенно учитывая деликатный характер оборудования. Кроме того, в нашей конструкции крышка была изготовлена из дерева, и теоретически возможно, что свойства материала, такие как плотность, жесткость и демпфирование вибраций, отличаются от свойств других материалов, например, металла. Хотя любое такое влияние, вероятно, было бы более релевантным для измерений, связанных с силой при размещении объекта, а не при подъеме, это тем не менее представляет собой возможный фактор, зависящий от конфигурации, который следует учитывать.
Процедура эксперимента
Участники случайным образом распределялись для начала с Эксперимента 1 или 2, чтобы контролировать эффекты порядка. Каждый эксперимент состоял из 81 подъема, где стимулы предъявлялись в заранее определенном псевдослучайном порядке, обеспечивая 20 проб для каждого куба и условия смены. Другими словами, было 20 проб легкий-после-легкого, 20 проб легкий-после-тяжелого, 20 проб тяжелый-после-тяжелого и 20 проб тяжелый-после-легкого. Первая проба каждого эксперимента отбрасывалась, поскольку она не включала ни смену, ни повторение пробы с той же массой, и была просто начальной пробой, оставляя 80 проб для анализа в каждом эксперименте.
Процедура слепого наблюдения
Участники носили очки с визуальной окклюзией PLATO (Translucent Technologies Inc., Торонто, ON, Канада), которые оставались закрытыми на протяжении всего эксперимента, открываясь только во время пробы. Эта процедура слепого наблюдения гарантировала, что реакции участников на объекты не подвергались влиянию наблюдения за взаимодействием экспериментатора со стимулами (Buckingham et al., 2014; Harris et al., 2024, 2025; Saccone et al., 2019), защищая от эффектов экспериментатора (Firestone & Scholl, 2016; Harris et al., 2024). Кроме того, стимул, который в данный момент не предъявлялся участнику, скрывался за экраном, чтобы оставаться вне поля его зрения при открытии очков.
Выполнение пробы
Проба начиналась, когда открывались очки, что сигнализировало участнику о необходимости схватить стимул и поднять его примерно на 5 см над платформой плавно и уверенно. Участники удерживали объект в подвешенном состоянии до звукового сигнала, обозначающего конец пробы, после чего очки закрывались через 4 секунды после открытия. Затем участники ставили объект обратно на платформу и давали перцептивную оценку его веса, используя абсолютные оценки величины (Zwislocki & Goodman, 1980). В частности, участники давали числовую оценку объекта на основе воспринимаемой, а не ожидаемой тяжести, где большие числа указывали на более тяжелый объект. Ограничений по шкале, используемой участниками для оценок величины, не было. Однако участники были проинструктированы поддерживать последовательность с выбранной ими шкалой на протяжении всего эксперимента.
Подготовка данных
Нормализация перцептивных оценок
Перцептивные оценки величины участников нормализовались путем преобразования их в процентные (%) значения. В частности, для каждого участника мы вычитали индивидуальную оценку из среднего значения их общего диапазона, затем делили это значение на среднее значение общего диапазона, умножая результат на 100. Эти %-оценки использовались в последующем анализе для обоих экспериментов.
Фильтрация и извлечение силовых данных
Записи силы сглаживались с помощью фильтра Баттерворта четвертого порядка с нулевым сдвигом фазы и низкочастотной фильтрацией с частотой среза 14 Гц перед анализом (Chouinard et al., 2009; Flanagan & Beltzner, 2000). Из этих данных о силе были получены несколько конкретных измерений: пиковая сила сжатия (peak grip force, PGF), которая описывала максимальную горизонтальную силу, приложенную к датчику силы, и пиковая сила нагрузки (peak load force, PLF), которая описывала максимальную вертикальную силу подъема. Для расчета этих значений данные о силе наносились на график во времени, и пики визуально идентифицировались и выбирались вручную оценщиком. Для уменьшения человеческой ошибки значение каждого истинного максимума, близкого к выбранному пику, записывалось с использованием внутреннего скрипта MATLAB (Saccone et al., 2019), процедура, которая показала отличную межоценочную надежность (Harris et al., 2024; Saccone et al., 2019). Кроме того, мы определили скорость, с которой эти силы применялись, измеряемую как пиковая скорость силы сжатия (peak grip force rate, PGFR) и пиковая скорость силы нагрузки (peak load force rate, PLFR). Это было сделано путем дифференцирования каждого сигнала силы с использованием трехточечного центрального разностного уравнения, которое рассчитывало скорость приложения силы в ньютонах/секунду в каждой временной точке, с выбором наибольшего значения. Тот же метод использовался для определения пиковой скорости силы платформы (peak platform force rate, PPFR), которая описывала максимальную скорость, с которой сила удалялась от датчика платформы.
Измерение силы при первом пике скорости и продолжительности фазы нагрузки
В дополнение к мерам пиковой силы мы рассмотрели силу нагрузки при первом пике скорости силы нагрузки (load force at first peak in load force rate, LF1st) и силу платформы при первом пике скорости силы платформы (platform force at first peak in platform force rate, PF1st). Для получения этих мер мы визуально идентифицировали первый пик, возникающий в фазе нагрузки, из данных о силе, нанесенных на график во времени. Наш пользовательский скрипт MATLAB затем идентифицировал точное максимальное значение первого пика и соответствующее время, последующим образом извлекая скорость силы нагрузки в это время. Наконец, мы использовали два различных автоматических метода для определения продолжительности фазы нагрузки (load phase duration, LPD) — периода между первым приложением силы и отрывом объекта от платформы. Первый — это мера на основе рукоятки (LPD1). Эта мера определялась путем вычитания времени отрыва, определенного нашими световыми датчиками, из времени, когда участники впервые применили к объекту силу нагрузки более 0,2 Н. Второй — это мера на основе платформы (LPD2) и рассчитывалась аналогично: время отрыва (с помощью световых датчиков) вычиталось из времени, когда снижение силы более 0,4 Н (поскольку, в отличие от рукояток, платформа измеряла полную силу, а не половину) было обнаружено датчиком силы в платформе. Для всех переменных, после завершения первоначальной обработки, мы удалили любые точки данных из анализа, которые были более чем на ±3 стандартных отклонения от среднего. В общей сложности было удалено 384 точки данных, что составляет 0,01% набора данных.
Анализ данных
Статистический анализ проводился с использованием JASP (версия 0.16.4, Университет Амстердама, Амстердам, Нидерланды) и GraphPad Prism (версия 9.1, GraphPad Software, Сан-Диего, Калифорния, США). Все тесты были двусторонними.
Повторные измерения ANOVA
Аналогичные повторные измерения дисперсионного анализа (ANOVA) 2 (Куб: легкий против тяжелого) × 2 (Смена: смена против без смены) проводились для каждой зависимой переменной в Эксперименте 1 (%-оценки, PLFR, PLF, PGFR, PGF, LF1st, LPD1, PPFR, PF1st и LPD2) и Эксперименте 2 (%-оценки, PPFR, PF1st и LPD2) для оценки конвергентной валидности метода на основе платформы по отношению к методу на основе рукоятки. Для эффектов взаимодействия мы сообщаем только о сравнениях между условиями смены и без смены для тяжелых и легких объектов, поскольку другие сравнения не представляли интереса. Где применимо, применялись поправки Бонферрони на семейную частоту к p-значениям для учета множественных сравнений, а размеры эффектов сообщаются как d Коэна.
Внутриклассовые корреляции (ICC)
Для изучения конкурентной валидности пиковой силы (PLFR и PPFR), силы при первом пике (LF1st и PF1st) и продолжительности фазы нагрузки (LPD1 и LPD2), собранных с помощью рукояток и платформы в Эксперименте 1, мы провели серию внутриклассовых корреляций (ICC; McGraw & Wong, 1996). ICC часто используются для оценки степени согласованности между различными измерениями одной и той же величины, причем значения варьируются от 0 до 1 (более высокие значения указывают на более сильную согласованность). Мы использовали форму ICC (3, 1), которая подходит при сравнении фиксированных методов измерения — в данном случае рукоятки и платформы — и когда нет намерения обобщать за пределы этих конкретных инструментов (Koo & Li, 2016). Значения ICC интерпретировались согласно Koo и Li (2016), где ≥ 0,90 указывает на отличное согласие.
Результаты
Эксперимент 1: Подъем объектов с рукоятками
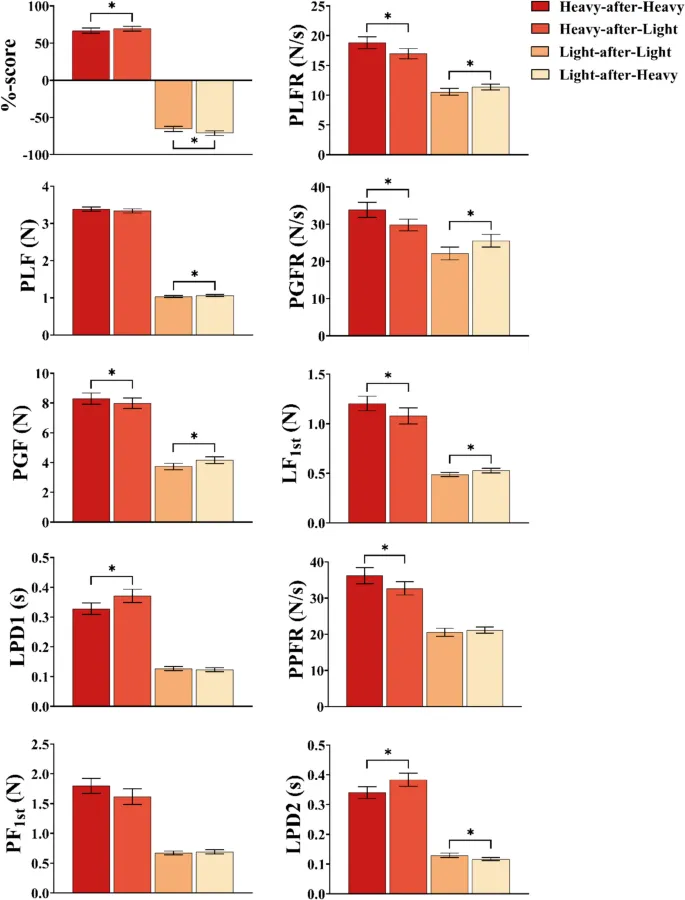
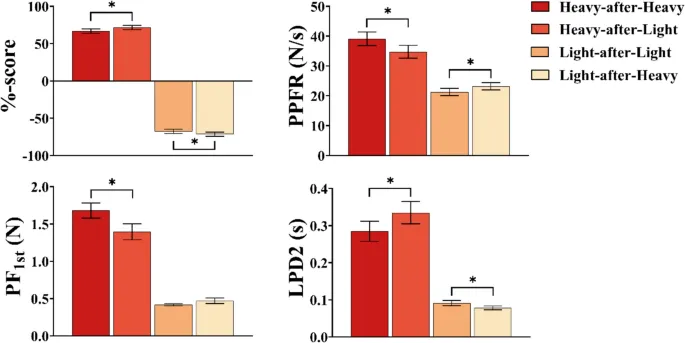
В целом, для мер на основе рукояток мы обнаружили сильные и последовательные эффекты взаимодействия между восприятием, PLFR, PLF, PGFR, PGF, LF1st и LPD1, где тяжелый куб воспринимался как более легкий и поднимался с меньшей силой, когда он следовал за легким кубом, а легкий куб воспринимался как более тяжелый и поднимался с большей силой, когда он следовал за тяжелым кубом. В отличие от этого, меры на основе платформы выявили эффекты взаимодействия только для тяжелого куба в PPFR, для обоих в LPD2 и ни для одного в PF1st. Сводка результатов ANOVA представлена в Таблице 2 (которая представляет результаты ANOVA для обоих экспериментов 1 и 2), а отдельные переменные представлены на Рис. 4.

Восприятие (%-оценки)
ANOVA по средним перцептивным %-оценкам участников выявила ожидаемый главный эффект куба (F(1, 28) = 438,91, p < 0,001, ηp² = 0,94), при котором тяжелый куб воспринимался как более тяжелый, чем легкий куб (среднее различие = 136,37, t = 20,95, d = 7,62, p < 0,001). Наблюдалось взаимодействие Куб × Смена (F(1, 28) = 16,59, p < 0,001, ηp² = 0,37), при котором тяжелый куб воспринимался как более тяжелый, когда он поднимался после легкого по сравнению с тяжелым кубом (среднее различие = 2,66, t = 2,07, p = 0,047; Рис. 4). Аналогичный эффект наблюдался для легкого куба, который воспринимался как более легкий, когда он поднимался после тяжелого по сравнению с легким кубом (среднее различие = 5,69, t = 4,62, p < 0,001).
Пиковая скорость силы нагрузки (PLFR)
Наблюдался главный эффект куба (F(1, 28) = 177,64, p < 0,001, ηp² = 0,86), при котором пиковая скорость силы нагрузки, приложенная для подъема тяжелого куба, была выше, чем приложенная для подъема легкого куба (среднее различие = 6,93, t = 13,33, d = 1,69, p < 0,001). Также наблюдалось взаимодействие Куб × Смена (F(1, 28) = 30,07, p < 0,001, ηp² = 0,52; Рис. 4), при котором средняя пиковая скорость силы нагрузки, приложенная для подъема тяжелого куба, была ниже в условии смены (тяжелый после легкого) по сравнению с условием без смены (тяжелый после тяжелого; 1,85, t = 4,72, d = 0,45, p < 0,001), а средние пиковые скорости силы нагрузки для легкого куба были выше в условии смены (легкий после тяжелого) по сравнению с условием без смены (легкий после легкого; среднее различие = 0,82, t = 3,54, d = 0,20, p = 0,001).
Пиковая сила нагрузки (PLF)
Наблюдался главный эффект куба (F(1, 28) = 2 260,87, p < 0,001, ηp² = 0,99), при котором тяжелый куб поднимался в среднем с большей пиковой силой нагрузки, чем легкий куб (среднее различие = 2,31, t = 47,55, d = 9,60, p < 0,001). Также было обнаружено взаимодействие Куб × Смена (F(1, 28) = 6,77, p = 0,015, ηp² = 0,20; Рис. 4), при котором большая пиковая сила нагрузки прилагалась к легкому объекту, когда он поднимался после тяжелого по сравнению с легким объектом (среднее различие = 0,03, t = 2,53, d = 0,12, p = 0,018), эффект, не наблюдавшийся для тяжелого объекта (p = 0,06).
Пиковая скорость силы сжатия (PGFR)
Наблюдался главный эффект куба (F(1, 28) = 87,81, p < 0,001, ηp² = 0,76), при котором тяжелый куб поднимался со средней пиковой скоростью силы сжатия выше, чем легкий куб (среднее различие = 7,97, t = 9,27, d = 0,84, p < 0,001). Также наблюдалось взаимодействие Куб × Смена (F(1, 28) = 30,82, p < 0,001, ηp² = 0,52; Рис. 4), при котором тяжелый куб поднимался с более низкой средней пиковой скоростью силы сжатия в условии смены (тяжелый после легкого) по сравнению с условием без смены (тяжелый после тяжелого; среднее различие = 4,07, t = 4,09, p = 0,002). Легкий куб также поднимался с большей пиковой скоростью силы сжатия, когда он поднимался после тяжелого объекта в условии смены (легкий после тяжелого) по сравнению с легким объектом в условии без смены (легкий после легкого; среднее различие = 3,43, t = 6,06, p < 0,001).
Пиковая сила сжатия (PGF)
Обнаружен главный эффект куба (F(1, 28) = 353,64, p < 0,001, ηp² = 0,93), при котором тяжелый куб поднимался со средней пиковой силой сжатия выше, чем легкий куб (среднее различие = 4,19, t = 18,81, d = 2,57, p < 0,001). Также наблюдалось взаимодействие Куб × Смена (F(1, 28) = 18,95, p < 0,001, ηp² = 0,40; Рис. 4). Пост-хок тесты выявили, что тяжелый куб поднимался с меньшей средней пиковой силой сжатия, когда он поднимался после легкого куба в условии смены (тяжелый после легкого) по сравнению с тяжелым кубом в условии без смены (тяжелый после тяжелого; среднее различие = 0,31, t = 2,35, d = 0,19, p = 0,026). Аналогичный эффект наблюдался для легкого куба, где большая средняя пиковая сила сжатия прилагалась в условии смены (легкий после тяжелого) по сравнению с условием без смены (легкий после легкого; среднее различие = 0,43, t = 6,41, d = 0,26, p < 0,001).
Сила нагрузки при первом пике скорости силы нагрузки (LF1st)
Наблюдался главный эффект куба (F(1, 28) = 96,62, p < 0,001, ηp² = 0,78), при котором средняя LF1st для подъема тяжелого куба была выше, чем для легкого куба (среднее различие = 0,63, t = 9,83, d = 2,08, p < 0,001). Также наблюдалось взаимодействие между условиями смены и без смены (F(1, 28) = 6,78, p = 0,02, ηp² = 0,20; Рис. 4), при котором средняя LF1st, приложенная к тяжелому кубу, была ниже в условии смены (тяжелый после легкого) по сравнению с условием без смены (тяжелый после тяжелого; среднее различие = 0,13, t = 2,46, d = 0,41, p = 0,020). Аналогичный эффект наблюдался для легкого куба, который поднимался с большей средней LF1st в условии смены (легкий после тяжелого) по сравнению с условием без смены (легкий после легкого; среднее различие = 0,04, t = 2,20, d = 0,13, p = 0,036).
Продолжительность фазы нагрузки 1 (LPD1)
ANOVA выявила главный эффект куба (F(1, 28) = 138,15, p < 0,001, ηp² = 0,83), при котором тяжелый куб в среднем поднимался дольше, чем легкий куб (среднее различие = 0,46, t = 11,75, d = 2,68, p < 0,001). Наблюдалось взаимодействие между условиями смены и без смены (F(1, 28) = 20,13, p < 0,001, ηp² = 0,42; Рис. 4), при котором тяжелый куб поднимался медленнее в условии смены (тяжелый после легкого) по сравнению с условием без смены (тяжелый после тяжелого; среднее различие = 0,04, t = 5,67, d = 0,51, p < 0,001), в то время как для легкого куба такого эффекта не наблюдалось (p = 0,526).
Пиковая скорость силы платформы (PPFR)
Наблюдался ожидаемый главный эффект куба (F(1, 28) = 114,92, p < 0,001, ηp² = 0,80), при котором тяжелый куб поднимался со средней пиковой скоростью силы платформы выше, чем легкий куб (среднее различие = 13,62, t = 10,72, d = 1,57, p < 0,001). Также наблюдалось взаимодействие между двумя условиями (F(1, 28) = 11,06, p = 0,002, ηp² = 0,28; Рис. 4), при этом пост-хок тесты показали, что тяжелый объект поднимался с меньшей средней силой после смены (тяжелый после легкого) по сравнению с условием без смены (тяжелый после тяжелого; среднее различие = 3,50, t = 3,03, d = 0,41, p = 0,005). На смену не было влияния на легкий объект (p = 0,511).
Сила платформы при первом пике скорости силы платформы (PF1st)
Наблюдался главный эффект куба (F(1, 28) = 114,89, p < 0,001, ηp² = 0,80), при котором большая PF1st прилагалась для подъема тяжелого по сравнению с легким кубом (среднее различие = 1,10, t = 10,72, d = 2,66, p < 0,001; Рис. 4). Взаимодействие Куб × Смена отсутствовало (p = 0,121).
Продолжительность фазы нагрузки 2 (LPD2)
ANOVA по мере продолжительности фазы нагрузки на основе платформы выявила главный эффект куба (F(1, 28) = 214,72, p < 0,001, ηp² = 0,89), указывающий на то, что тяжелый куб в среднем поднимался на 0,24 с дольше, чем легкий куб (t = 14,65, d = 2,85, p < 0,001). Также наблюдался эффект взаимодействия между условиями смены и без смены (F(1, 28) = 30,72, p < 0,001, ηp² = 0,52; Рис. 4), при этом пост-хок тесты показали, что продолжительность LPD2 для тяжелого куба была больше в условии смены по сравнению с условием без смены (среднее различие = 0,04, t = 5,35, d = 0,52, p < 0,001), и LPD2 для легкого куба была больше, когда он поднимался в условии смены по сравнению с условием без смены (среднее различие = 0,01, t = 3,27, d = 0,15, p = 0,003).
Сравнение данных, полученных с платформы и рукоятки
Мы также стремились оценить достоверность метода платформы, сравнивая данные, которые она зарегистрировала, с данными, зарегистрированными одновременно с помощью рукоятки. Для данных о пиковой силе нагрузки / скорости силы платформы мы обнаружили умеренную и отличную согласованность в условиях как смены, так и без смены для тяжелого объекта. Однако для легкого объекта уровень согласованности был заметно ниже, варьируясь от умеренного до хорошего для условий легкий-после-легкого и от плохого до хорошего для условий легкий-после-тяжелого. Аналогичная закономерность наблюдалась в данных о силе при первом пике, при этом согласованность для тяжелого объекта была от умеренной до отличной и от хорошей до отличной для условий без смены и смены соответственно. Однако для легкого объекта согласованность снова снизилась, будучи от умеренной до хорошей независимо от условия смены. Эта закономерность продолжалась и в данных о продолжительности фазы нагрузки. В частности, мы наблюдали отличную согласованность в LPD1 и LPD2 для тяжелого объекта как в условиях смены, так и без смены, что указывает на то, что и платформа, и рукоятки с высокой степенью согласованности определяли момент отрыва. Однако для легкого объекта согласованность варьировалась от умеренной до хорошей для подъемов без смены и от плохой до умеренной для условий смены. По всем измерениям — пиковая сила, сила при первом пике и продолжительность фазы нагрузки — наблюдалась большая согласованность для тяжелого объекта по сравнению с легким объектом.
Различия в согласованности в зависимости от веса объекта
Различия в согласованности между методами в зависимости от веса объекта заметны, и их влияние можно наблюдать в экспериментальных результатах ANOVA в Эксперименте 1. Например, в мере пиковой силы на основе рукоятки были обнаружены значимые взаимодействия для обоих весов объектов, в то время как данные на основе платформы показали взаимодействия только для тяжелого объекта. В мере силы при первом пике данные на основе рукоятки показали ожидаемые взаимодействия для обоих весов объектов, но не наблюдалось эффекта взаимодействия для меры на основе платформы. Аналогичное различие, зависящее от метода, проявилось в мере фазы нагрузки, где взаимодействия были значимы только для тяжелого объекта с использованием рукояток, но для обоих — тяжелого и легкого — объектов с платформой. Это подчеркивает потенциальные проблемы предположения о сопоставимости данных рукоятки и платформы, особенно для легких объектов, поскольку неверные предположения могут привести к существенно разным экспериментальным результатам в Эксперименте 1.
Выводы о конкурентной валидности
В целом, анализ внутриклассовых корреляций предполагает, что метод на основе платформы демонстрирует надежную конкурентную валидность с методом на основе рукоятки для данных о тяжелых объектах. Однако для легких объектов согласованность была последовательно ниже по всем мерам силы и времени. Примечательно, что это расхождение не может быть объяснено различиями в воспринимаемом весе на основе несоответствия ожиданий, поскольку эти эффекты наблюдались для обоих — тяжелых и легких — объектов. Тем не менее, эта согласованность не отразилась в ICC, где расхождение возникло только для легкого объекта. Это предполагает, что наблюдаемые различия, вероятно, связаны с ограничениями в регистрации силы для объектов меньшей массы с использованием платформы, а не с влиянием, основанным на ожиданиях, и могут отражать зависящие от массы различия в том, как платформа фиксирует силу при отрыве или около него. Хотя в нашем дизайне было всего две массы объектов, эти результаты указывают на то, что платформа может быть менее надежной для измерения сил при низкой массе объекта. Соответственно, будущие исследования с использованием платформы должны либо рассмотреть возможность исключения данных о более легких объектах, как это сделано в предыдущих работах (Baugh et al., 2016; Flanagan et al., 2008; Trewartha & Flanagan, 2016), либо интерпретировать такие данные с осторожностью. Хотя многие вопросы все еще могут быть решены только с использованием более тяжелых объектов, исследования, специально ориентированные на более легкие весовые диапазоны, могут потребовать альтернативных методов, таких как традиционный подход на основе рукоятки.
Заключительные замечания
Хотя метод платформы имеет ограничения, включая невозможность измерения сил сжатия и снижение захвата данных для более легких объектов, наши результаты помогают прояснить, как он сравнивается с устоявшимся подходом на основе рукоятки. В частности, мы обнаружили свидетельства как конвергентной, так и конкурентной валидности для тяжелых объектов, что дает уверенность в сопоставимости результатов между методами и мерами в этих условиях. Однако такой же уровень согласованности не наблюдался для легкого объекта, что предполагает, что два метода не следует считать взаимозаменяемыми во всех контекстах. Эти результаты предлагают более информированную основу для принятия методологических решений, поддерживая использование платформы в исследованиях, где методы на основе рукояток непрактичны или где приоритет отдается естественным взаимодействиям, одновременно подчеркивая необходимость осторожности при применении ее в других условиях. Будущие исследования могут лучше определить конкретные диапазоны весов объектов, которые лучше всего подходят для метода платформы, чтобы дальнейшее уточнение его оптимального использования.





