
Интересное сегодня



Введение в исследование мимики человекоподобных роботов
Коммуникация между людьми происходит естественным образом, поскольку мы очень искусны в обмене различными сигналами при социальном взаимодействии. Явные сигналы, такие как жесты, представляют собой богатый источник информации для вывода целей и намерений действий других людей. Например, если мы находимся в кафе и наблюдаем, как кто-то протягивает руку к чашке, мы можем интуитивно понять, что делает агент (например, берет чашку), а также почему он это делает (например, берет чашку, чтобы выпить, или берет чашку, чтобы передать ее другому человеку).
С нейрофизиологической точки зрения этот процесс обусловлен наличием "зеркального механизма", основанного на активности набора нейронов (зеркальных нейронов), расположенных в теменных и лобных областях, которые активируются как когда люди выполняют целенаправленные действия, так и когда они наблюдают за другими людьми, выполняющими те же действия. Однако помимо цели (что) и намерения (почему) другой фундаментальный аспект действия связан с его формой, то есть с тем, как действия выполняются.
Следуя предыдущему примеру, в зависимости от социального контекста или настроения агента, он может взять чашку энергично или деликатно и передать ее грубо или мягко. Таким образом, вариации силы, направления и скорости действия агента могут позволить наблюдателю сделать вывод об аффективном состоянии и отношении агента. Эти особые аспекты социальной коммуникации были определены Дэниелом Стерном как формы витальности.
Методология исследования
Участники и дизайн эксперимента
Восемнадцать здоровых добровольцев-правшей (11 женщин и 7 мужчин, средний возраст 24,28, стандартное отклонение 2,42) приняли участие в кинезиологическом эксперименте. Размер выборки был определен на основе результатов априорного анализа мощности, выполненного с помощью GPower 3.1. Все участники имели нормальное или скорректированное до нормального зрение. Никто не сообщал о неврологических или когнитивных расстройствах.
Робот iCub и визуальные стимулы
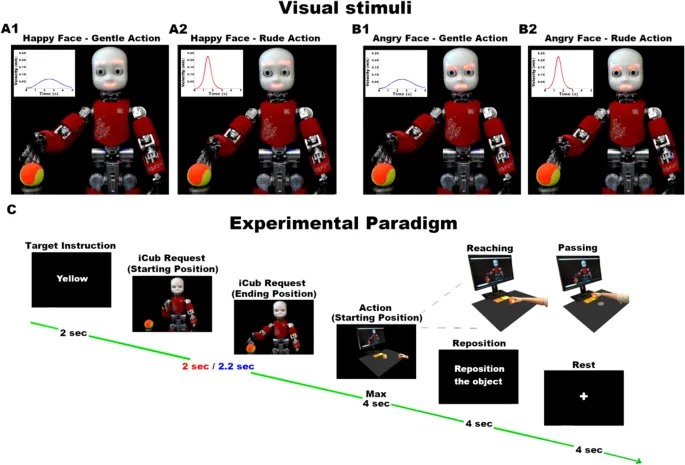
В настоящем исследовании робот iCub представлял агента взаимодействия с участниками. Платформа iCub - это человекоподобный робот с 53 степенями свободы, того же размера, что и ребенок 3 или 4 лет, оснащенный множеством датчиков, включая датчики силы/крутящего момента, энкодеры во всех его суставах и камеры для глаз. Эти функции позволяют понять его конфигурацию тела, двигательные навыки, а также способность показывать выражения лица, что делает его идеальной платформой для исследований взаимодействия человека и робота.
Здесь стимулы состояли из видеоклипов, показывающих робота iCub, выполняющего просьбу о передаче участникам. В частности, робот iCub двигал своей правой рукой мягко или грубо с ладонью вверх, приглашая участников передать ему маленький шарик. Эти действия были созданы путем перенацеливания кинематических данных, записанных с обученного актера, с антропометрическими показателями, подобными показателям робота, который выполнял действия мягко или грубо по отношению к объекту.
Результаты эксперимента
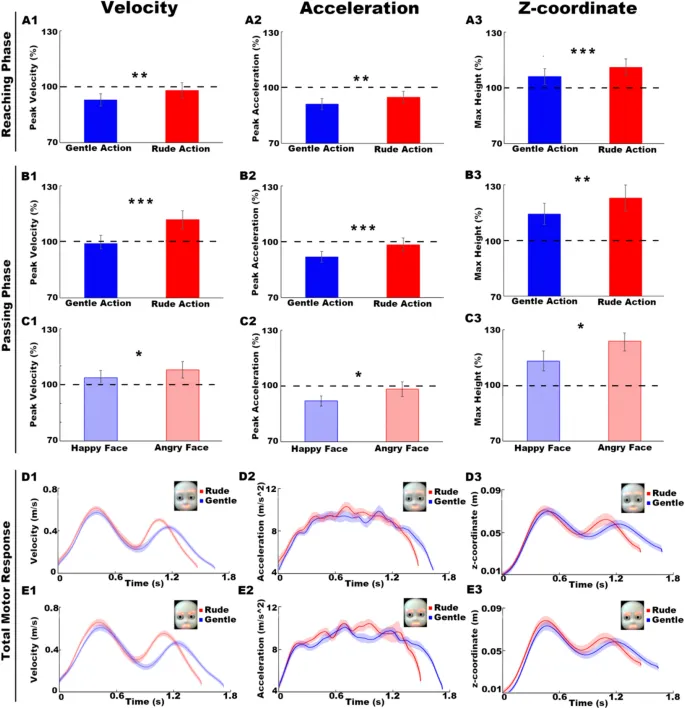
Основной эффект ВИТАЛЬНОСТИ был значимым для следующих кинематических параметров как для фазы достижения, так и для фазы передачи: пиковая скорость, пиковое ускорение, максимальная высота, продолжительность действия и время до пиковой скорости. Основной эффект ВЫРАЖЕНИЯ ЛИЦА был значимым для следующих кинематических параметров только в фазе передачи: пиковая скорость, пиковое ускорение, максимальная высота, продолжительность действия и время до пиковой скорости.
Эффект взаимодействия ВИТАЛЬНОСТЬ*ВЫРАЖЕНИЕ ЛИЦА не был обнаружен. Анализ максимального раскрытия руки не выявил значительного основного эффекта ВИТАЛЬНОСТИ и ВЫРАЖЕНИЯ ЛИЦА. Нижняя часть рисунка 2 изображает кривые скорости, ускорения и траектории действий участников в ответ на запросы робота iCub, выполненные мягко или грубо с happy или angry выражением лица.
Обсуждение результатов
Наблюдение за действиями, выполняемыми другими людьми, является важным источником информации для понимания их целей и намерений. Кроме того, наблюдение за различными способами (то есть формами витальности) выполнения действий позволяет нам сделать вывод об отношении и аффективных состояниях агента. Предыдущие исследования показали, что в отсутствие дополнительных социальных сигналов мягкие и грубые формы витальности, выраженные агентом, воспринимаются как передача положительного и отрицательного отношения соответственно, соответствующим образом модулируя моторное поведение участников.
Примечательно, однако, что действия вложены в социальный контекст, и другие невербальные сигналы, такие как выражения лица, представляют собой фундаментальный ресурс для понимания аффективного состояния людей, с которыми мы взаимодействуем. С этой точки зрения настоящее исследование aimed to исследовать, могут ли и как положительные и отрицательные выражения лица агента изменить восприятие их форм витальности действий и, следовательно, моторное поведение получателя.
Влияние конгруэнтных и инконгруэнтных условий
Чтобы определить этот возможный эффект, мы протестировали два различных условия. В конгруэнтном условии выражение лица и форма витальности действия агента характеризовались одинаковой валентностью (положительной: счастливое лицо и мягкое действие; отрицательной: сердитое лицо и грубое действие), тогда как в инконгруэнтном условии выражение лица и форма витальности действия агента характеризовались противоположной валентностью (счастливое лицо и грубое действие; сердитое лицо и мягкое действие).
Важно отметить, что инконгруэнтное условие стало возможным благодаря использованию гуманоида, такого как робот iCub. Действительно, reliance на обученного актера как агента взаимодействия было бы чрезвычайно сложно и не экологично during ассоциации двух социальных сигналов (выражения лица и формы витальности действия), характеризующихся противоположной валентностью.
Практическое значение и будущие исследования
Наши результаты показали, что, помимо форм витальности действий, выражения лица являются essential источниками информации для понимания состояния агента и, thus, представляют собой ключевой инструмент для общения с другими. Что наиболее важно, мы показали, что положительные и отрицательные выражения лица, связанные с мягкими и грубыми формами витальности действий, могут изменить восприятие формы действия, модулируя моторное поведение людей.
Эти результаты проливают новый свет на восприятие действий during межличностных взаимодействий и открывают новые перспективы в отношении некоторых патологий, характеризующихся неспособностью распознавать эмоциональные выражения лица. Действительно, deficits в распознавании facial эмоций являются одним из наиболее распространенных когнитивных нарушений, и они extensively изучались в нескольких клинических популяциях, включая шизофрению, расстройство аутистического спектра, СДВГ, болезнь Паркинсона и т.д.
Ограничения исследования
Следует учитывать некоторые потенциальные ограничения текущего исследования. Во-первых, during фазы достижения мы не обнаружили ни эффекта выражения лица iCub на модуляцию кинематических параметров, ни эффекта витальности действия iCub и выражения лица на максимальное раскрытие хватающей руки. Отсутствие этих эффектов может быть связано с ограничениями, связанными с типом объекта (маленький шарик), который требовал более точного захвата для правильного движения.
Во-вторых, участники наблюдали динамическое действие (выражение грубых и мягких форм витальности), но статическое выражение лица (счастливые и сердитые лица). Действительно, робот iCub способен передавать различные basic эмоции с помощью своих выражений лица (например, счастье, гнев), просто включая светодиодную подсветку, исходящую от бровей и рта. С этой точки зрения использование статических выражений лица могло уменьшить эффект на реакцию участников.





