
Интересное сегодня
Приверженность к лечению при диабете 2 типа: роль семейной п...
Введение и актуальность проблемы Сахарный диабет (СД) — хроническое заболевание, характеризующееся г...
Как долго длится эмоциональная связь с бывшим партнером: рез...
Эмоциональная связь с бывшим партнером: сколько времени требуется, чтобы «отпустить»? После окончани...
Новое исследование: самооценка и депрессия связаны слабее, ч...
Развенчание мифа: депрессия и самооценка не так тесно связаны Депрессия и низкая самооценка часто ра...
Психологическое состояние и социальная адаптация пациентов с...
Введение Травма спинного мозга (ТСМ) чаще всего возникает в результате дорожно-транспортных происшес...
Исследование влияния виртуальной реальности на вызывание тяг...
Введение Алкогольная зависимость (AD) является одной из самых серьезных проблем здравоохранения, с т...
Роль когнитивных усилий в регуляции эмоций: этапы, влияние и...
Введение в регуляцию эмоций и когнитивные усилия Психологи давно интересуются стратегиями, которые i...
Введение
Даже при попытке максимально устойчиво зафиксировать взгляд, глаза все равно демонстрируют медленные непрерывные движения, известные как окулярный дрейф, которые чередуются с небольшими саккадами, часто называемыми микросаккадами (Rolfs, 2009; Poletti, 2023). Исследования этих фиксационных движений глаз показали, что они могут играть важную роль в восприятии (например, Hafed, 2013; Boi, Poletti, Victor, & Rucci, 2017; Clark, Intoy, Rucci, & Poletti, 2022; Rolfs & Schweitzer, 2022; Poletti, 2023; Nghiem, Witten, Dufour, Harmening, & da Silveira, 2025), могут отражать распределение внимания (Hafed & Clark, 2002; Engbert & Kliegl, 2003; Hafed, Lovejoy, & Krauzlis, 2011; Khademi et al., 2024) и также могут иметь клиническое значение (например, Kumar & Chung, 2014; Chung, Kumar, Li, & Levi, 2015; Shaikh, OteroMillan, Kumar, & Ghasia, 2016; Sheehy et al., 2020; Nieboer, Ghiani, de Vries, Brenner, & Mann, 2023; Murari et al., 2024; Lee et al., 2025).
Однако во многих ситуациях эти фиксационные движения глаз являются помехой. Например, при офтальмологической визуализации непрерывные движения глаз снижают качество изображения (CarrascoZevallos et al., 2016; de Castro et al., 2023), при глазной хирургии они негативно влияют на результаты (Mrochen, Kaemmerer, Mierdel, & Seiler, 2001; Porter et al., 2005), а также вносят шум в исследования функции сетчатки (Sutter & Tran, 1992; Menz, Sutter, & Menz, 2004; Zhang et al., 2008). В этих и многих других случаях может возникнуть желание минимизировать фиксационные движения глаз.
Мишени для фиксации и их влияние на стабильность
Для достижения стабильной фиксации, то есть фиксации с минимальным количеством фиксационных движений глаз, часто используются мишени для фиксации. В литературе описано множество различных дизайнов таких мишеней (см. Thaler, Schütz, Goodale, & Gegenfurtner, 2013, для систематического обзора; и также Nieboer et al., 2023). Однако остается неясным, какой дизайн мишени обеспечивает наиболее стабильную фиксацию.
Ряд исследований изучал влияние различных параметров дизайна мишеней на стабильность фиксации. Большинство из них рассматривали общую стабильность фиксации, операционализированную как дисперсия положения взгляда (квантифицируемая как BCEA, Crossland & Rubin, 2002, или как стандартное отклонение положений взгляда) в течение всего эпизода фиксации. Некоторые также анализировали частоту микросаккад или смещение микросаккад, происходивших во время фиксации.
Несколько исследований показали, что контраст мишени, цвет мишени, цвет фона и формы фона не влияют на общую стабильность фиксации (Steinman, 1965; Boyce, 1967; Murphy et al., 1974; Ukwade & Bedell, 1993). Фиксация становилась менее стабильной только в случае, когда контраст мишени был таким, что мишень едва видна или совсем не видна (McCamy, Najafian Jazi, OteroMillan, Macknik, & MartinezConde, 2013; см. также Cherici, Kuang, Poletti, & Rucci, 2012).
Размер мишени для фиксации оказывает умеренное влияние на общую стабильность фиксации: меньшие мишени приводят к меньшей дисперсии взгляда во время фиксации и меньшим микросаккадам (Steinman, 1965; Rattle, 1969; McCamy et al., 2013; Thaler et al., 2013; Hirasawa et al., 2016). Однако имеются противоречивые данные о влиянии размера мишени на частоту микросаккад: одно исследование сообщило о более низкой частоте микросаккад для меньших мишеней (Thaler et al., 2013), в то время как другие исследования сообщили о более высоких частотах микросаккад для меньших мишеней (McCamy et al., 2013; Steinman, 1965).
Размытие мишени приводит к снижению общей стабильности фиксации и увеличению количества микросаккад (Ghasia & Shaikh, 2015; Ukwade & Bedell, 1993). Фиксация на более сложных мишенях, состоящих из нескольких элементов (круг с крестом и небольшой точкой, Thaler et al., 2013; и функция Бесселя, состоящая из центральной доли, окруженной несколькими кольцами уменьшающейся интенсивности, Bhattarai, Suheimat, Lambert, & Atchison, 2019), показала большую стабильность по сравнению с фиксацией на простых формах (круг, Thaler et al., 2013, и гауссовский всплеск, Bhattarai et al., 2019).
Наконец, Bowers et al. (2021) сообщили, что анимированная мишень для фиксации, состоящая из концентрических кругов, сжимающихся внутрь, не привела к различиям в общей стабильности фиксации, характеристиках саккад или дрейфа по сравнению с двумя статическими дизайнами мишеней (мальтийский крест и диск), а статические мишени также не показали различий в фиксационных движениях глаз.
Проблемы с видео-айтрекерами и преимущества ретинальных систем
Еще одним заслуживающим внимания отличием между вышеупомянутыми исследованиями является используемая технология айтрекинга для изучения стабильности фиксации. В то время как многие из более ранних исследований использовали различные методы, отличающиеся высокой точностью, в большей части современных работ применялись видео-айтрекеры. Мы ставим под сомнение пригодность видео-айтрекеров для изучения стабильности фиксации, поскольку они имеют ряд существенных недостатков.
Во-первых, видео-айтрекеры не подходят для изучения окулярного дрейфа, поскольку, даже если они генерируют сигналы взгляда, напоминающие окулярный дрейф, эти сигналы, вероятно, в значительной степени отражают не физические движения глаз, а артефакты метода айтрекинга (см. Niehorster, Zemblys, & Holmqvist, 2021, для обсуждения). В частности, небольшие движения головы относительно камеры айтрекера могут вызывать изменения в зарегистрированном положении взгляда (Merchant et al., 1974; Houben et al., 2006; Kolakowski & Pelz, 2006; Cerrolaza et al., 2012; Hermens, 2015; Holmqvist et al., 2021), в то время как изменения размера зрачка также могут приводить к смещениям положения взгляда, регистрируемым айтрекером, при отсутствии фактического вращения глаза (артефакт изменения размера зрачка, PSA, см. Wyatt, 2010; Drewes, Masson, & Montagnini, 2012; Drewes, Zhu, Hu, & Hu, 2014; Choe, Blake, & Lee, 2016; Jaschinski, 2016; Hooge, Hessels, & Nyström, 2019; Hooge, Niehorster, Hessels, Cleveland, & Nyström, 2021; Hooge et al., 2025).
Во-вторых, видео-айтрекеры не обладают достаточным разрешением для фиксации мельчайших микросаккад и недостаточной точностью (RMSS2S около 2.4' или хуже, Nyström, Niehorster, Andersson, & Hooge, 2021) для точной оценки медленных фиксационных движений глаз, таких как окулярный дрейф (Collewijn & Kowler, 2008; Kimmel et al., 2012; McCamy et al., 2015; Poletti & Rucci, 2016).
Единственным исключением является работа Bowers et al. (2021), которые использовали ретинальный айтрекер, но сосредоточили свое исследование на влиянии задачи фиксации (активная, когда участники выполняли задачу различения в месте фиксации, против пассивной, когда участникам было предложено фиксировать взгляд без дополнительной задачи) на стабильность фиксации, а не на влиянии дизайна точки фиксации.
Цель и дизайн исследования
Учитывая эти опасения (наличие артефактного дрейфа из-за PSA и движения головы, а также недостаточного разрешения и точности), мы считаем, что значительная часть цитируемой выше работы нуждается в пересмотре. В частности, мы не можем исключить, что часть сообщаемых различий в стабильности фиксации являются артефактами используемого метода айтрекинга (PCR — видео-айтрекинг), в то время как потенциально интересные эффекты дизайна мишени для фиксации на стабильность фиксации могли быть упущены.
Здесь мы, подобно Bowers et al. (2021), используем ретинальный айтрекер для повторного изучения стабильности фиксации, обеспечиваемой рядом мишеней для фиксации, использованных в предыдущих исследованиях (Thaler et al., 2013; Bhattarai et al., 2019). Положение взгляда, регистрируемое ретинальным айтрекером, который мы использовали (Bartuzel et al., 2020), не подвержено влиянию небольших движений головы или изменений размера зрачка (Hooge et al., 2025). Кроме того, он обладает точностью, значительно превосходящей точность видео-айтрекеров (RMSS2S до 0.07', см. методы ниже, по сравнению примерно с 2.4' даже для лучших видео-айтрекеров, Nyström et al., 2021). Это позволяет нам не только исследовать общую стабильность фиксации с помощью площади бивариантного эллипса контура (BCEA, распространенная мера пространственного разброса положений взгляда во время фиксации, Steinman, 1965; Crossland & Rubin, 2002; Castet & Crossland, 2012; Niehorster, Zemblys, Beelders, & Holmqvist, 2020), но и отдельно изучать характеристики саккад и окулярного дрейфа, происходящих во время фиксации.
Исследовательские вопросы
Текущее исследование имело два исследовательских вопроса. Во-первых, мы спросили, можем ли мы реплицировать результаты предыдущих исследований (Thaler et al., 2013; Bhattarai et al., 2019) относительно того, какая мишень является «лучшей» для фиксации, то есть мишень, обеспечивающая наиболее стабильную фиксацию в смысле минимального разброса положений взгляда во время фиксации и минимальной частоты микросаккад. Используя чувствительность нашей измерительной установки, мы далее расширили исследование «лучшей» мишени для фиксации, систематически сравнивая характеристики микросаккад и окулярного дрейфа между различными мишенями для фиксации. Учитывая вышеприведенный обзор литературы, мы ожидаем, что мишени для фиксации, содержащие мелкий элемент (например, точку в центре) и мишени, содержащие несколько элементов (например, несколько колец или дополнительный крест), будут вызывать более стабильную фиксацию в смысле меньшего разброса зарегистрированных положений взгляда.
Являются ли такие мишени также причиной более низкой частоты микросаккад, неясно, поскольку предыдущие исследования (Steinman, 1965; McCamy et al., 2013; Thaler et al., 2013) сообщали о различных эффектах размера мишени на частоту микросаккад.
Наш второй исследовательский вопрос заключался в том, влияет ли стабильность фиксации на полярность мишени для фиксации относительно фона, на котором она размещена. В частности, мы разместили белые мишени на черном фоне и черные мишени на сером фоне — два типа дисплеев для фиксации, которые часто используются в литературе. Мы не ожидали систематических различий между этими двумя условиями полярности, поскольку предыдущие исследования показали, что контраст мишени, полярность и яркость фона не влияют на стабильность фиксации (Steinman, 1965; Boyce, 1967; Ukwade & Bedell, 1993; McCamy et al., 2013).
Однако возможно, что фиксация будет более стабильной для мишеней на сером фоне, потому что в нашей установке внешний край серого фона имел высокий контраст с черным краем экрана, в то время как в условии черного фона этот край не был виден. Этот край в условии серого фона предоставляет дополнительный элемент, который может помочь стабилизировать взгляд.

Методы
Участники
В эксперименте приняли участие шесть участников (возраст 26–59 лет, пять мужчин, одна женщина) с нормальным или скорректированным до нормального зрением, которые предоставили информированное согласие. Пятеро из них являются авторами данной статьи. Трое были наивны в отношении предыдущих исследований дизайна точек фиксации на момент записи, но имели опыт работы с мишенями в офтальмологических приборах. Во время настройки оборудования использовалась система бадаловского оптометра, интегрированная в установку айтрекинга (Bartuzel et al., 2020), чтобы гарантировать, что визуальные стимулы казались участникам четко сфокусированными.
Аппаратура и визуальные стимулы
Данные айтрекинга были получены с помощью FreezEye Tracker (FET, Bartuzel et al., 2020). Это прототипное устройство работает по принципу конфокального сканирующего офтальмоскопа и записывает небольшие прямоугольные ретинальные кадры размером (3.00^irc m 0.05^irc ) imes (3.00^irc m 0.05^irc ) с частотой дискретизации 620 Гц.
По сравнению с установкой, описанной в Bartuzel et al. (2020), в нашем устройстве были внесены следующие существенные улучшения:
- источник света трекера был изменен с лазерного диода (длина волны: 785 нм, оптическая мощность: 100 мкВт) на сверхлюминесцентный диод (центральная длина волны: 920 нм, ширина спектра: 20 нм, оптическая мощность: 200 мкВт), чтобы сделать сканирующий луч невидимым для участника, тем самым избегая потенциальных нежелательных отвлекающих факторов и уменьшая спекл-контраст на выходных изображениях;
- бумажный экран с подсветкой для отображения мишени был заменен проектором (Dell M410HD), который в сочетании с пользовательской оптической подсистемой обеспечивал оптическое разрешение 0.9' (примерно 67 пикселей/градус, что означает, что отдельные пиксели были невидимы) и позволял выводить серию изображений для реализации протокола данного исследования.
Траектории взгляда вычисляются путем попарного выравнивания последовательных ретинальных кадров, полученных устройством FET. FET демонстрирует высокую точность: среднеквадратичное отклонение от выборки к выборке (Niehorster et al., 2020, RMSS2S) для данных, использованных в данной статье, составило 0.156' (диапазон 0.07'–0.60'). Примечательно, что FET не требует калибровки, за исключением нулевой точки. Средняя потеря данных (ретинальные кадры, для которых не удалось определить положение взгляда), включая моргание, составила 0.65% (диапазон 0–7.1%) для данных, использованных в этой статье.
Визуальные стимулы
Визуальные стимулы представлялись с помощью проектора Dell M410HD, настроенного в вертикально инвертированном режиме, как определено характеристиками оптического канала. Эффективное разрешение дисплея составляло 800 пикселей × 1280 пикселей с частотой обновления 59.81 Гц. Для представления стимулов использовалась часть экрана размером 400 пикселей × 400 пикселей (соответствующая 6° × 6° визуального угла).
Для минимизации движений головы участники были зафиксированы с помощью упора для подбородка и лба. Стимулы представлялись с использованием PsychoPy версии v2023.1.0 (Peirce, 2007; Peirce et al., 2019).
Дизайн мишеней
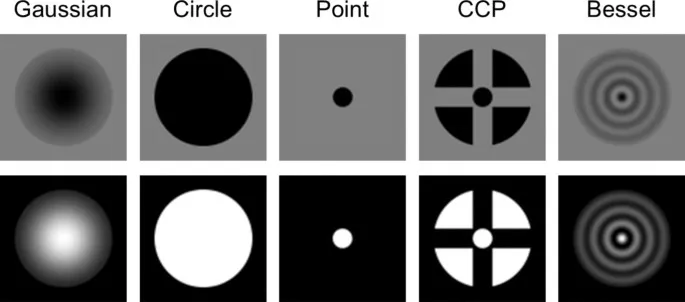
Были использованы пять различных дизайнов мишеней для фиксации, отличающихся резкостью краев, размером элементов и их количеством (рис. 1). В частности, из Bhattarai et al. (2019) были взяты мишени «Гауссовский круг» и «Бессель», а из Thaler et al. (2013) — «Круг» (их B), «Точка» (их A) и «Круг-Крест-Точка» (их ABC, далее CCP).
Внешний диаметр всех мишеней для фиксации, кроме мишени «Точка», составлял 1.02°. Диаметр мишени «Точка», а также точки в центре мишени CCP составлял 0.21°. Каждая из них была представлена в двух условиях полярности: черный на сером и белый на черном. Мишень Бесселя была сгенерирована с использованием функции Бесселя первого рода, реализованной с помощью функции besselj() в MATLAB R2023b.
Процедура
В начале каждой записи участники садились и помещали голову на подставку для подбородка и лба перед окуляром, через который просматривались дисплеи. Затем они регулировали положение подставки для подбородка и фокус системы бадаловского оптометра до тех пор, пока не получали четкое изображение стимула. После этого оператор настраивал фокус оптического пути FET для оптимизации ретинального изображения, и запись начиналась.
Каждая сессия записи начиналась с серии 2-секундных представлений небольшой мишени CCP (внешний диаметр 0.3°, диаметр центральной точки 0.06°), расположенной на расстоянии 2.82° от центра экрана в направлениях 45°, 135°, 225° и 315°. После каждой из этих эксцентрических фиксаций та же самая небольшая мишень CCP отображалась в центре экрана в течение 2 секунд. Данные взгляда во время четырех фиксаций на небольшой мишени CPP в центре экрана использовались для калибровки нулевой точки каждой записи. После этой последовательности из восьми 2-секундных экранов фиксации пять мишеней для фиксации отображались в случайном порядке по 30 секунд каждая. Между каждой мишенью для фиксации показывались маски, состоящие из случайно расположенных сегментов пяти мишеней для фиксации, в течение 3 секунд.
Каждый участник завершил как минимум три сессии на каждое условие полярности, при этом мишени для фиксации представлялись в различных случайных порядках. Для некоторых участников проводилось больше сессий, чтобы иметь запас на случай сбоя некоторых записей, сделанных с прототипом айтрекера. В анализ были включены все доступные успешные сессии (до шести).
Анализ данных
Обнаружение микросаккад и эпизодов дрейфа
Сначала данные айтрекинга, полученные для сессии, были разделены на пять 30-секундных сегментов, по одному на каждую мишень для фиксации. Микросаккады в каждом из этих сегментов независимо детектировались с помощью алгоритма Engbert и Kliegl (Engbert & Kliegl, 2003) с использованием стандартных параметров и λ=6, а минимальное смещение саккады составляло 4'. Саккады, расположенные ближе чем на 20 мс друг к другу, объединялись, чтобы избежать регистрации колебаний в конце саккады как отдельных саккад.
Все эпизоды между микросаккадами, не содержащие потери данных и длившиеся более 100 мс, были классифицированы как эпизоды дрейфа. Саккады и эпизоды дрейфа в течение первой половины секунды сегмента исключались из дальнейшего анализа, чтобы избежать включения в анализ потенциальных саккад, выполненных для захвата мишени после интервала маски между отображениями мишеней для фиксации.
Кроме того, саккады, начинавшиеся или заканчивавшиеся на расстоянии более 2.5° от центра мишени для фиксации, а также эпизоды дрейфа со средним положением более 2.5° от центра мишени для фиксации, исключались из дальнейшего анализа. По всем сессиям измерения было исключено из дальнейшего анализа 19 саккад и четыре эпизода дрейфа с использованием этого критерия расстояния, что соответствует 0.4% всех саккад и 0.1% всех дрифтов, включенных в анализ.
Характеристики микросаккад и дрейфа
Выбранные микросаккады и эпизоды дрейфа были далее проанализированы. Во-первых, была вычислена площадь бивариантного эллипса контура (BCEA, Steinman, 1965; Crossland & Rubin, 2002; Castet & Crossland, 2012; Niehorster et al., 2020) для положений взгляда во время выбранных эпизодов микросаккад и дрейфа. Эллипс BCEA масштабировался таким образом, чтобы он содержал 68.27% положений взгляда (то есть 1 стандартное отклонение). BCEA объединяет саккадные и дрейфовые компоненты фиксационных движений глаз.
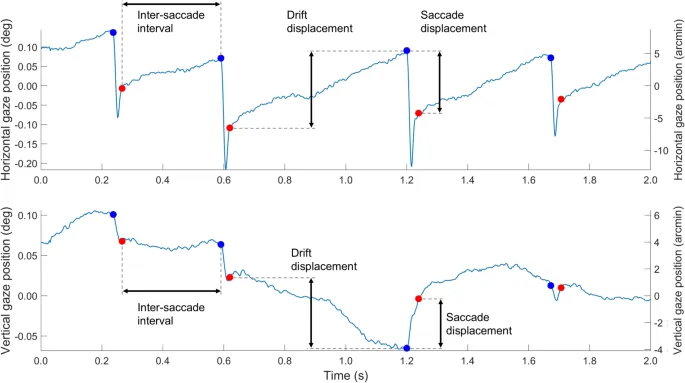
Чтобы более подробно изучить, какие аспекты фиксационных движений глаз отличаются для различных мишеней фиксации, мы вычислили несколько метрик для микросаккад и эпизодов дрейфа (см. рис. 2 для операционализации нескольких из этих метрик).

Микросаккады
Для микросаккад были рассчитаны частота, смещение и направление. Смещение микросаккады операционализировалось как расстояние между последним образцом положения взгляда перед началом микросаккады и первым образцом положения взгляда после конца микросаккады. Таким образом, оно не включало перерегулирование в конце микросаккады. Направление каждой микросаккады определялось с использованием тех же выборок положения взгляда, что и для смещения микросаккады.
Дрейф
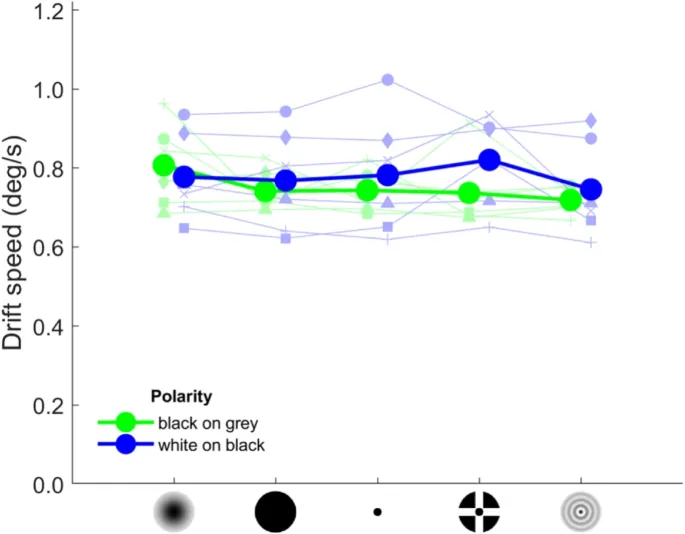
Для эпизодов дрейфа определялись смещение, направление, длина траектории и скорость. Смещение дрейфа операционализировалось как расстояние между первым образцом положения взгляда в начале эпизода дрейфа и последним образцом положения взгляда в конце эпизода дрейфа. Направление дрейфа во время каждого эпизода определялось с использованием тех же выборок положения взгляда, что и для смещения дрейфа. Длина траектории определялась путем расчета расстояний между соседними выборками во время эпизода дрейфа, а затем суммирования этих расстояний. Для определения скорости дрейфа сначала отдельно рассчитывалась скорость по каждой оси (горизонтальной и вертикальной) путем вычисления градиента сигнала положения с использованием функции gradient() из пакета numpy на Python, применяя центральные разности второго порядка. Скорость дрейфа затем операционализировалась как средняя величина сигнала скорости взгляда во время эпизода дрейфа. Длительность эпизодов дрейфа не исследовалась, поскольку она обратно пропорциональна частоте микросаккад и, следовательно, избыточна.
Визуализация и статистический анализ
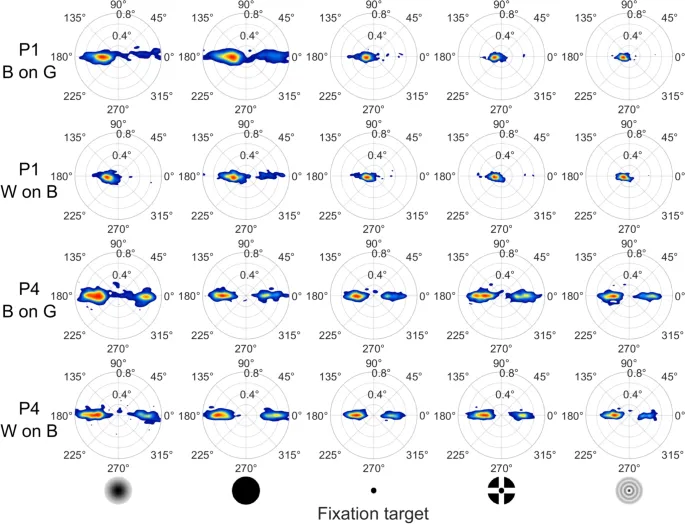
Для визуализации распределения смещения и направления микросаккад, вычисленные смещения и направления собирались для каждой мишени фиксации, условия полярности и участника, а затем подвергались процедуре оценки плотности ядра на 2D (Botev et al., 2010). Полученные данные затем дискретизировались в 22-уровневый контурный график, нижний уровень которого не отображался для ясности.

Для проверки, вызывают ли мишени для фиксации различия по каким-либо из исследуемых мер фиксационных движений глаз, мы провели Байесовский ANOVA-анализ (Rouder et al., 2012; Morey & Rouder, 2015) с использованием JASP 0.19.3 (JASP Team, 2025). В частности, были проведены повторные измерения ANOVA 2 (полярность) x 5 (мишень для фиксации) с участником в качестве случайного фактора. Мы используем обозначение для Байесовских факторов, реализованное в JASP, которое количественно определяет силу доказательств в пользу различий между условиями на основе наблюдаемых данных. Более высокие значения Байесовских факторов указывают на более сильные доказательства (Schönbrodt & Wagenmakers, 2018); Байесовские факторы в диапазоне от 3 до 10 интерпретируются как умеренные доказательства, значения от 10 до 30 — как сильные доказательства, от 30 до 100 — как очень сильные доказательства, а значения, превышающие 100, считаются крайними доказательствами в пользу проверяемой гипотезы. Напротив, Байесовские факторы ниже 1 предоставляют доказательства против проверяемой гипотезы и, следовательно, указывают на силу доказательств отсутствия различий между условиями. В частности, Байесовские факторы в диапазоне от 0.1 до 1/3 указывают на умеренные доказательства против гипотезы, от 1/3 до 0.1 — на сильные доказательства, от 0.01 до 1/30 — на очень сильные доказательства, а значения меньше 0.01 — на крайние доказательства против проверяемой гипотезы. Байесовские факторы в диапазоне от 1/3 до 3 указывают на то, что данные не предоставляют существенных доказательств ни в пользу гипотезы, ни против нее.
Результаты
Общая стабильность фиксации
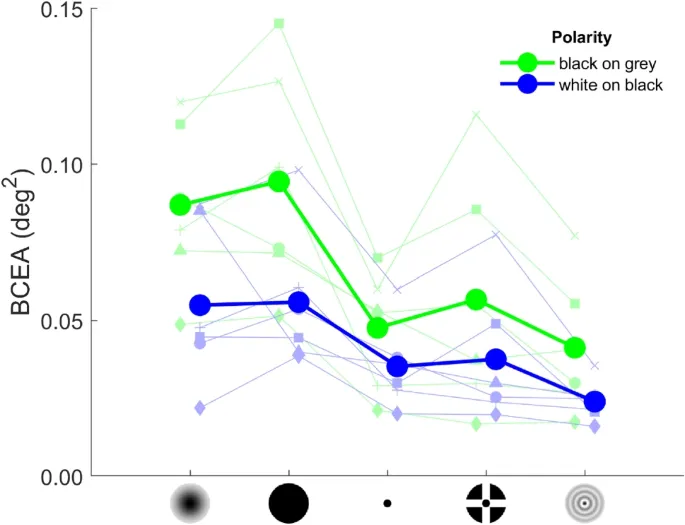
Вначале мы исследуем общую стабильность фиксации, оцененную по BCEA. Рис. 4 показывает среднюю BCEA для различных мишеней для фиксации и условий полярности, а также значения для каждого участника. Байесовский ANOVA-анализ показал, что модель только с основными эффектами мишени для фиксации и полярности мишени была наиболее подтверждена данными (BF_m=4.17).
В целом, стабильность фиксации была ниже для мишеней черный на сером (0.0654 град²) по сравнению с мишенями белый на черном (0.0415 град², BF_{10}>10,000).
Кроме того, парные сравнения показали, что при обеих полярностях мишеней стабильность фиксации была ниже для мишеней «Гауссовский» (0.0709 град²) и «Круг» (0.0752 град²) по сравнению с тремя другими мишенями (Точка: 0.0414 град², CCP: 0.0471 град², Бессель: 0.0326 град²; BF_{10}>8.88). Стабильность фиксации была одинаковой для мишеней «Гауссовский» и «Круг» (BF_{10}=0.268), а также для мишеней «Точка» и CCP (BF_{10}=0.269). Данные не позволили нам сделать вывод о наличии различий в BCEA между мишенью Бесселя и мишенями «Точка» (BF_{10}=0.928) или CCP (BF_{10}=1.71).

Характеристики микросаккад
Далее мы исследуем характеристики микросаккад. На рис. 5 представлены примеры гистограмм для двух репрезентативных участников, показывающие распределение смещения и направления микросаккад. Как видно, саккады были преимущественно горизонтальными, причем один участник совершал микросаккады преимущественно в одном направлении (P1, влево), в то время как другой участник совершал саккады в двух направлениях (P4, влево и вправо). Действительно, все участники демонстрировали саккады либо в одном (два участника), либо в двух противоположных (четыре участника) направлениях.
Смещение микросаккад кажется меньшим для мишеней, содержащих мелкие элементы (Точка, CCP и Бессель), по сравнению с мишенями, не содержащими таких элементов (Гауссовский и Круг), но, по-видимому, не отличается систематически между условиями полярности мишени. Направление микросаккад, по-видимому, не отличается систематически между мишенями и условиями полярности.

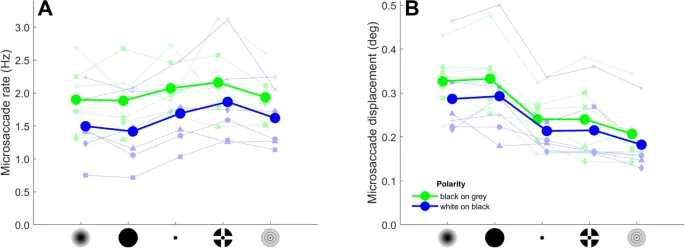
На рис. 6 представлены количественные анализы характеристик микросаккад. Байесовский ANOVA-анализ частоты микросаккад (рис. 6A) показал, что модель только с основными эффектами мишени для фиксации и полярности мишени была наиболее подтверждена данными (BF_m=12.2).
В целом, частота микросаккад была выше для мишеней черный на сером (1.99 Гц) по сравнению с мишенями белый на черном (1.62 Гц, BF_{10}>10,000).
Кроме того, парные сравнения показали, что при обеих полярностях мишеней не наблюдается больших различий в частоте микросаккад между мишенями. Частота микросаккад была выше для мишени CCP (2.01 Гц) по сравнению с мишенью Круг (1.65 Гц, BF_{10}=3.32). Частота микросаккад была одинаковой для мишеней «Гауссовский» (1.70 Гц) и «Круг» (BF_{10}=0.222), для мишеней «Точка» (1.88 Гц) и CCP (BF_{10}=0.324), а также для мишеней «Гауссовский» и «Бессель» (1.78 Гц, BF_{10}=0.324). Другие парные сравнения показали неубедительные доказательства относительно того, различается ли частота микросаккад между мишенями (BF_{10} в диапазоне от 0.383 до 1.99).
Что касается смещения микросаккад (рис. 6B), Байесовский ANOVA также наилучшим образом подтвердил модель только с основными эффектами мишени для фиксации и полярности мишени (BF_m=41.5).
Смещение микросаккад было больше для мишеней черный на сером (0.269 град) по сравнению с мишенями белый на черном (0.238 град, BF_{10}=1515).
Парные сравнения показали, что при обеих полярностях мишеней данные подтвердили, что смещение микросаккад было больше для мишеней «Гауссовский» (0.307 град) и «Круг» (0.313 град) по сравнению с тремя другими мишенями (Точка: 0.227 град, CCP: 0.228 град, Бессель: 0.195 град; BF_{10}>411). Смещение микросаккад было одинаковым для мишеней «Гауссовский» и «Круг» (BF_{10}=0.241), а также для мишеней «Точка» и CCP (BF_{10}=0.221). Другие парные сравнения показали неубедительные доказательства относительно того, различается ли смещение микросаккад между мишенями (BF_{10} в диапазоне от 0.997 до 2.48).

Характеристики дрейфа
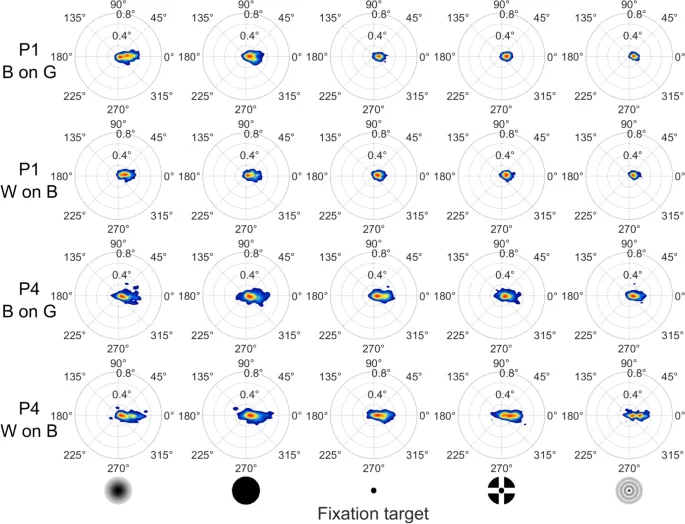
Начнем с изучения характеристик дрейфа с помощью гистограмм на рис. 7, которые показывают распределение смещения и направления дрейфа по условиям полярности мишени и мишеням фиксации для тех же двух примерных участников, что и на рис. 5. Гистограммы показывают, что дрейф был преимущественно вправо для обоих примерных участников. Для всех участников дрейф имел одно преобладающее направление, варьируясь от вправо до вниз, причем у некоторых наблюдалось косое промежуточное направление.
Сравнивая смещение дрейфа на рис. 7 (величина на гистограммах) со смещением микросаккад на рис. 5, смещение дрейфа оказывается примерно вдвое меньше смещения микросаккад. Это соответствует относительным величинам смещения дрейфа и микросаккад, сообщенным Bowers et al. (2021).
Сравнивая направления дрейфа и микросаккад, можно увидеть, что преобладающее направление дрейфа было противоположно одному из преобладающих направлений микросаккад. Это наблюдалось у всех участников. Ни смещение, ни направление дрейфа, по-видимому, систематически не отличаются между мишенями и условиями полярности.

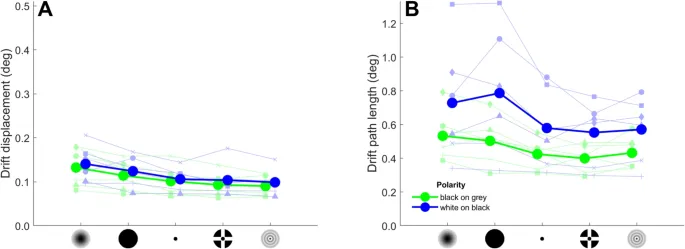
На рис. 8 и 9 представлены количественные анализы характеристик дрейфа. Байесовский ANOVA-анализ смещения дрейфа (рис. 8A) показал, что модель только с основными эффектами мишени для фиксации и полярности мишени была наиболее подтверждена данными (BF_m=4.13), хотя и незначительно больше, чем модель, включающая только основной эффект мишени для фиксации (BF_m=3.56).
Действительно, данные не предоставили убедительных доказательств того, что смещение дрейфа больше для мишеней черный на сером (0.106 град) по сравнению с мишенями белый на черном (0.115 град, BF_{10}=0.597).
Парные сравнения показали, что при обеих полярностях мишеней данные подтвердили, что смещение дрейфа было больше для мишеней «Гауссовский» (0.137 град) и «Круг» (0.119 град) по сравнению с тремя другими мишенями (Точка: 0.104 град, CCP: 0.0984 град, Бессель: 0.0945 град; BF_{10}>20.26), за исключением неубедительных доказательств различий между мишенями «Круг» и «Точка» (BF_{10}=2.29). Смещение дрейфа было одинаковым для мишеней «Точка» и CCP (BF_{10}=0.322) и для мишеней CCP и Бессель (BF_{10}=0.244). Другие парные сравнения показали неубедительные доказательства относительно того, различается ли смещение дрейфа между мишенями (BF_{10} в диапазоне от 0.586 до 0.831).
Длины траекторий дрейфа (рис. 8B) были намного больше, чем общее смещение дрейфа, как и ожидалось, поскольку дрейф извилист по сложной траектории, а не идет по прямой линии. Байесовский ANOVA-анализ длины траектории дрейфа показал, что модель только с основными эффектами мишени для фиксации и полярности мишени была наиболее подтверждена данными (BF_m=33.5).
Длина траектории дрейфа была больше для мишеней белый на черном (0.644 град) по сравнению с мишенями черный на сером (0.459 град, BF_{10}=0.597).
Парные сравнения показали, что при обеих полярностях мишеней данные подтвердили, что длина траектории дрейфа для мишеней «Гауссовский» (0.631 град) и «Круг» (0.645 град) была больше, чем для мишени CCP (0.502 град), в то время как она не давала доказательств того, что длина траектории дрейфа для этих двух мишеней отличалась от таковой для мишеней «Точка» (0.476 град) и «Бессель» (0.502 град). Длина траектории дрейфа была одинаковой для мишеней «Гауссовский» и «Круг» (BF_{10}=0.225), а также для мишеней CCP, «Точка» и «Бессель» (BF_{10} в диапазоне от 0.220 до 0.279).
Что касается скорости дрейфа (рис. 9), нулевая модель была лучше подтверждена данными (BF_m=6.70) по сравнению с моделями, включающими основной эффект мишени для фиксации (BF_m=0.058) или полярности мишени (BF_m=2.17). Таким образом, данные предоставляют доказательства того, что скорость дрейфа не отличается между мишенями для фиксации или условиями полярности.
Следует отметить, что при постоянной скорости дрейфа по всем условиям мишеней и полярности, длина траектории дрейфа (рис. 8B) является почти зеркальным отражением частоты микросаккад (рис. 6A): более низкие частоты микросаккад, и, следовательно, более длительные интервалы между саккадами совпадают с более длинными траекториями дрейфа.


Обсуждение
Мы использовали высокоточный ретинальный айтрекер для изучения фиксационных движений глаз при устойчивой фиксации пяти различных мишеней для фиксации в двух условиях полярности мишени. Нашей целью было выяснить, существуют ли различия в общей стабильности фиксации между этими мишенями и условиями полярности, а также далее изучить различия в характеристиках движений глаз (микросаккад и дрейфа), происходящих во время фиксации.
Анализируя общую стабильность фиксации с помощью пространственного разброса положений взгляда (операционализированного как BCEA) в 30-секундных пробах, мы обнаружили, что фиксация была более стабильной для мишеней с небольшим элементом в центре (мишени «Точка», «Круг-Крест-Точка» [CCP] и «Бессель»), чем для мишеней без этого элемента. Кроме того, мы обнаружили, что фиксация была более стабильной для мишеней белый на черном, чем для мишеней черный на сером.
Изучая характеристики микросаккад и дрейфа во время фиксации, мы обнаружили, что не было различий в скорости дрейфа или смещении во время эпизода дрейфа между условиями полярности мишени. В соответствии с выводами об общей стабильности фиксации, участники совершали более частые и крупные микросаккады при фиксации на мишенях черный на сером, чем на мишенях белый на черном. Далее, в соответствии с выводами об общей стабильности фиксации, мы обнаружили, что участники демонстрировали меньшее смещение микросаккад, смещение дрейфа и длину траектории дрейфа для мишеней с небольшим элементом в центре. Однако скорость дрейфа не отличалась между мишенями, а частота микросаккад, по-видимому, была немного выше для мишени CCP и в некоторой степени для мишени «Точка» по сравнению с другими мишенями для фиксации. Наконец, мы обнаружили, что смещение дрейфа было в 2–3 раза меньше, чем смещение микросаккад.
Какая мишень для фиксации «лучшая»?
В целом, по большинству рассмотренных нами мер, мишенями для фиксации, обеспечивающими наиболее стабильную фиксацию, являются те, которые имеют небольшой элемент в центре (мишени «Точка», CCP и «Бессель»). Эти мишени показали наименьший общий разброс положений взгляда (BCEA) во время эпизода фиксации, а также последовательно меньшее смещение микросаккад и дрейфа, и меньшую длину траектории дрейфа.
Однако, если требуется минимизировать частоту микросаккад, то больший размер мишени для фиксации без такого мелкого элемента в центре (мишени «Гауссовский» и «Круг») может быть лучшим выбором. Таким образом, мы не можем сделать вывод о существовании единственной «лучшей» мишени для фиксации. Вместо этого, наиболее подходящая мишень зависит от того, желает ли человек оптимизировать лучшую общую стабильность фиксации и минимальные смещения микросаккад и дрейфа, или минимальную частоту микросаккад (например, для минимизации электрической или нейронной активности, связанной с саккадами, Dimigen, Valsecchi, Sommer, & Kliegl, 2009).
Представляется вероятным, что для разных дизайнов исследований можно выбрать оптимизацию под различные типы фиксационных движений глаз. Кроме того, независимо от того, какой аспект фиксационных движений глаз оптимизируется, наши результаты показывают, что существует множество дизайнов мишеней для фиксации, которые дают примерно одинаковое поведение.
Следует отметить, что различия между мишенями, которые мы сообщаем по различным мерам, на наш взгляд, не являются ни удивительными, ни внутренне противоречивыми. Учитывая, что скорость дрейфа была постоянной во всех условиях, можно было бы ожидать большей длины траектории дрейфа и смещения для тех дизайнов мишеней и полярностей, для которых частота микросаккад ниже, поскольку более низкие частоты микросаккад влекут за собой более длительные периоды дрейфа. Это, в свою очередь, может привести к большему среднему смещению микросаккад, поскольку более крупные микросаккады могут потребоваться для компенсации большего смещения дрейфа и предотвращения ухода взгляда от мишени фиксации. Эти большие смещения дрейфа и микросаккад также отражаются в большем общем разбросе измеряемых положений взгляда (BCEA).
Как наши результаты соотносятся с литературой?
Во-первых, наши выводы лишь частично совпадают с результатами Thaler et al. (2013). Они обнаружили, что мишень CCP обеспечивала как низкую частоту микросаккад, так и низкий пространственный разброс во время эпизода фиксации, что позволило им назвать ее «лучшей» мишенью для фиксации. Как и Thaler et al. (2013), мы обнаружили, что пространственный разброс был ниже для мишени CCP, чем для мишени «Круг». Однако, в отличие от их выводов, мы наблюдали более высокую — а не более низкую — частоту микросаккад для мишени CCP по сравнению с мишенью «Круг».
Причина этого расхождения неясна, но стоит отметить, что наши выводы согласуются с данными Steinman (1965) и McCamy et al. (2013), которые сообщали о более частых микросаккадах для меньших мишеней. Возможно, что, в соответствии с отчетом McCamy et al. (2013) и данными, представленными здесь, участники Thaler et al. совершали меньшие микросаккады при фиксации на мишени CCP, чем на мишени «Круг». Более низкая наблюдаемая ими частота микросаккад могла быть вызвана менее надежным обнаружением этих меньших микросаккад, учитывая ограниченную точность их оборудования для айтрекинга.
Во-вторых, наши выводы о том, что стабильность фиксации была ниже для мишеней черный на сером, чем для мишеней белый на черном, не соответствовали бы литературе, которая не показала влияния контраста на стабильность фиксации (Ukwade & Bedell, 1993; McCamy et al., 2013). Это также противоречит нашим ожиданиям, выраженным во введении, что края серого фона служат дополнительным элементом, который может способствовать стабильности фиксации.
Хотя у нас нет объяснения этому результату, возможно, что более яркие остаточные изображения мишени, наблюдаемые в условиях белый на черном по сравнению с черным на сером, могут помочь удерживать взгляд выровненным с мишенью.
Объяснение разницы между смещением микросаккад и дрейфа
Наше открытие о том, что смещение дрейфа было в 2–3 раза меньше, чем смещение микросаккад, может показаться неожиданным. Можно было бы ожидать, что смещение дрейфа и микросаккад будет схожим, иначе взгляд будет систематически уходить от мишени фиксации во время 30-секундного испытания. Наши результаты согласуются с относительными величинами смещения дрейфа и микросаккад, сообщенными Bowers et al. (2021).
Что может объяснить эти наблюдения о большем среднем смещении микросаккад по сравнению с дрейфом? Хотя роль микросаккад часто предполагается как противодействие дрейфу и возвращение взгляда к мишени, участники совершают микросаккады не только в направлении, противоположном дрейфу. Например, участник P4 на рис. 5 совершал частые микросаккады в двух направлениях, как в том же, так и в противоположном направлении к дрейфу. Фактически, четыре из шести участников нашего исследования совершали частые микросаккады в двух противоположных направлениях. Мы предполагаем, что средний вектор смещения всех микросаккад будет примерно в направлении, противоположном среднему смещению дрейфа, что объясняет, почему взгляд систематически не уходил от мишени во время фиксации.
Дальнейшее изучение сигналов положения взгляда показало, что во время фиксации участники, демонстрирующие два преобладающих направления микросаккад, также, казалось, проявляли квадратные рывки (SWJ, Abadi, & Gowen, 2004; Leigh, & Zee, 2006; OteroMillan et al., 2011; McCamy et al., 2013), то есть саккады от мишени, за которыми с небольшой задержкой следует вторая корректирующая саккада обратно к мишени. Поскольку смещение саккады во время SWJ, как сообщается, больше, чем смещение саккад, не являющихся частью SWJ (OteroMillan et al., 2011), возможно, что наличие SWJ объясняет, почему мы наблюдаем среднее смещение микросаккад, превышающее среднее смещение дрейфа.
Помимо этого потенциального объяснения несоответствия смещений дрейфа и микросаккад, наши данные не позволяют исключить возможность того, что большая амплитуда микросаккад была обусловлена перерегулированием микросаккад относительно центра мишени фиксации, как это было ранее сообщено (Tian et al., 2016, 2018; Willeke et al., 2019).
Рекомендации по выбору мишени и будущие направления исследований
Даже если наши выводы показывают, что мишень CCP Thaler et al. (2013) не является однозначно «лучшей», рекомендуем ли мы людям продолжать ее использовать? Да, поскольку мы считаем, что наши результаты не свидетельствуют о том, что CCP является неэффективной мишенью для фиксации.
Каковы преимущества мишени CCP для фиксации? Во-первых, нам нравится, что она имеет мелкий элемент в центре в виде четко определенной точки. Такие маленькие точки, по-видимому, обеспечивают более стабильную фиксацию, и участникам легко давать инструкции точно фиксировать эту точку. Потенциальным улучшением мишени CCP, которое может обеспечить еще более стабильную фиксацию, является дальнейшее уменьшение размера центральной точки (ср. Hooge et al., 2025). Следует отметить, что неизвестно, вызывает ли дальнейшее уменьшение размера центральной точки мишени CCP более стабильную фиксацию, а также может ли это привести к дальнейшему и потенциально нежелательному увеличению частоты микросаккад.
Во-вторых, другим хорошим аспектом мишени CCP является наличие крупного элемента, который облегчает периферическое обнаружение мишени, что может быть важно, например, в парадигмах, где мишень фиксации перемещается из одного положения в другое на значительные расстояния. Наконец, включение креста в дизайн мишени для фиксации обеспечивает дополнительные высококонтрастные края, которые могут способствовать бинокулярной фиксации.
Потенциально негативным аспектом мишени CCP является то, что ее высококонтрастные края могут вызывать сильные остаточные изображения. Если это вызывает беспокойство, мишень Бесселя с ее плавно модулированными краями может быть более подходящей.
Другим измерением дизайна мишеней для фиксации, которое можно было бы исследовать, является использование динамических точек фиксации. Например, некоторые офтальмологические устройства, такие как платформа Heidelberg Spectralis, используют мигающую точку в качестве мишени для фиксации, в то время как методы ретинального айтрекинга с использованием видимого шаблона сканирования, который для участника выглядит как узор концентрических кругов, движущихся внутрь, также были описаны (Damodaran et al., 2017; Vienola et al., 2018).
Неизвестно, вызывают ли такие динамические мишени для фиксации иные фиксационные движения глаз по сравнению со статическими мишенями, использованными в данном исследовании. Насколько нам известно, только одно исследование (Bowers et al., 2021) изучало фиксационные движения глаз на динамическую мишень фиксации (концентрические круги, движущиеся внутрь), но не обнаружило различий в фиксационных движениях глаз между этой мишенью и двумя различными статическими мишенями. Мы считаем, что это не только интересное направление для дальнейших исследований, но и важное, учитывая использование динамических точек фиксации в клинической практике.
Другим аспектом, который может быть полезно рассмотреть при оценке качества мишени для фиксации, является то, вызывает ли она точную фиксацию, то есть смотрят ли участники точно в ее центр. Методы данного исследования не подходили для решения этого вопроса. Хотя используемый нами FET айтрекер не требует калибровки, он требует определения нулевой точки для предоставления точного измерения положения взгляда. Несмотря на то, что каждая запись данных начиналась с четырех коротких фиксаций на мишени для фиксации в центре экрана, мы не считаем, что это позволяет нам достаточно точно определить ноль для оценки точности фиксации на наших мишенях. Вероятно, для определения абсолютного положения фиксации с достаточной точностью потребуются другие методы, такие как коррекция смещения, зависимая от взгляда (O’Regan, 1978; Poletti & Rucci, 2016). Это оставляет плодотворное поле для будущих исследований.
Наконец, мы хотим подчеркнуть, что, по нашему мнению, проведение данного исследования с помощью видео-айтрекера было бы невозможно. Многие движения глаз, которые мы описываем в этом исследовании, очень малы (например, среднее смещение дрейфа и микросаккад составляет 0.11 град и 0.25 град соответственно), а различия между условиями еще меньше. Например, наибольшее различие в амплитуде дрейфа между мишенями для фиксации (мишени «Гауссовский» и «Бессель») составило всего 2.55' (0.043 град), а средняя скорость дрейфа по всем мишеням и условиям полярности составляла всего 0.76 град/с.
Для надежного измерения таких малых и медленных движений глаз требуется айтрекер с точностью, значительно превышающей точность даже лучшего видео-айтрекера. Кроме того, сообщаемые нами смещения дрейфа намного меньше, чем артефактные сдвиги взгляда, постоянно вносимые в сигнал взгляда, например, естественными изменениями размера зрачка (Hooge et al., 2025). Таким образом, мы присоединяемся к призыву других авторов (например, Collewijn & Kowler, 2008; Poletti & Rucci, 2016) о том, что исследователи, планирующие изучать миниатюрные движения глаз, должны тщательно рассмотреть, подходит ли используемое ими оборудование для их дизайна исследования (ср. Nyström et al., 2025).





