
Интересное сегодня


Введение
Успешное взаимодействие человека с окружающим миром требует обработки соответствующих сенсорных сигналов. Например, при захвате объекта люди выбирают точки захвата на основе визуальной информации о размере объекта, его ориентации, форме или материале поверхности. Однако зрение не всегда является наиболее надежным чувством для определения relevant properties (релевантных свойств) объектов. Действительно, хотя массу объекта можно определить по визуальной информации, поскольку масса обычно увеличивается с размером объекта, бывают случаи, когда зрение вводит нас в заблуждение, как в иллюзии размера-веса. Точно так же, хотя распределение массы объекта можно определить по его форме, некоторые объекты, которые кажутся симметричными, на самом деле могут иметь асимметричное распределение массы.
При захвате объектов со свойствами, которые нельзя надежно определить с помощью зрения, например, с неизвестным распределением массы, люди, по-видимому, adopt (применяют) общее хватательное поведение. Если распределение массы остается неизменным в repeated trials (повторяющихся пробах), люди быстро обучаются и устанавливают более надежные predictions (предсказания) о свойствах объекта, что помогает адаптировать их моторное поведение за счет принятия более подходящих хватательных поз и приложения более эффективных усилий пальцев, которые способствуют стабильному захвату и манипулированию объектом. В таких случаях очевидно, что люди изучают динамику объекта через prior experiences (предыдущий опыт), возникающий из соматосенсорной обратной связи во время взаимодействия с объектами.
Феномен тактильного подавления
Несмотря на важность соматосенсорной обратной связи для моторного контроля и обучения, соматосенсорные афференты, в частности из тактильной области, обычно подавляются во время движения. Этот феномен тактильного подавления в первую очередь объясняется internal feedforward model (внутренней моделью прямой связи), которая предсказывает будущие сенсорные состояния движущейся конечности и подавляет associated sensory signals (связанные сенсорные сигналы) на основе эфферентных сигналов, связанных с лежащим в основе движением.
Тактильное подавление обычно оценивается путем представления тактильных стимулов на конечности, когда она движется, по сравнению с состоянием покоя. Поэтому было высказано предположение, что тактильное подавление может быть чувствительно не только к сенсомоторным предсказаниям, но и к другим факторам, таким как backward masking (обратное маскирование) или attentional processes (процессы внимания) из-за dual-tasking (многозадачности). Например, периферические механизмы, такие как проприоцептивные афференты, возникающие из самого движения, могут obstruct (препятствовать) восприятию тактильного стимула на движущейся конечности через обратное маскирование. Однако тактильное подавление не сильнее в те моменты, когда сигналы сенсорной обратной связи сильнее, например, когда усиливаются силы захвата и нагрузки.
Методология исследования
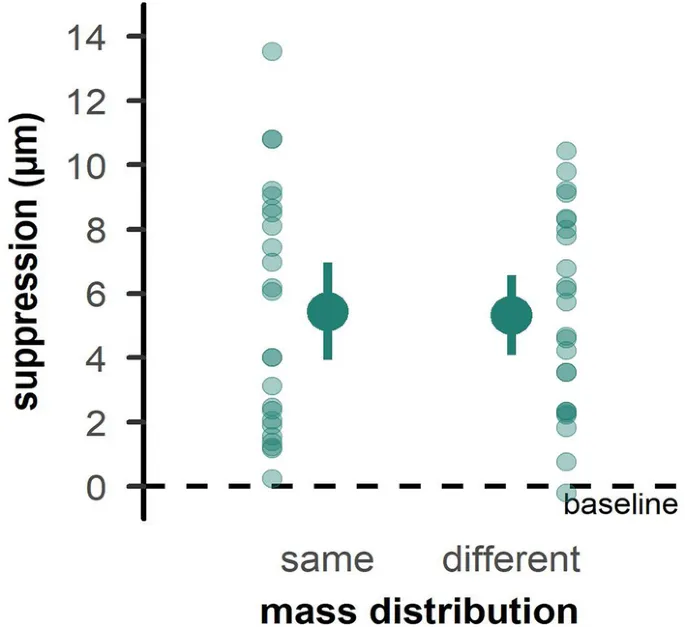
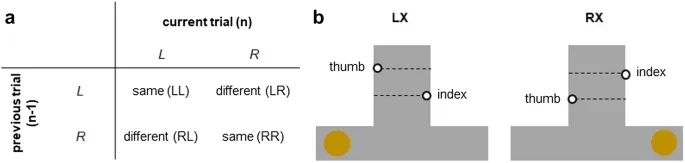
В настоящем исследовании мы стремились изучить, влияют ли такие предсказания, основанные на сенсомоторных воспоминаниях, на кинематику захвата и связанную с ним тактильную обработку. Мы попросили участников захватывать и поднимать объект с распределением массы, которое нельзя было определить по визуальной информации. Распределение массы объекта изменялось в псевдослучайном порядке по trials (пробам), но, без ведома участников, последовательные пробы могли включать либо одинаковое, либо разное распределение массы.
В момент контакта с объектом на указательный палец хватающей руки предъявлялся кратковременный вибротактильный пробный стимул для исследования тактильного подавления, и участники должны были сообщить, обнаружили ли они этот пробный стимул или нет. Мы исследовали тактильное подавление именно в момент контакта, а не позже, чтобы изолировать эффекты сенсомоторного предсказания без contamination (загрязнения) последующей сенсорной обратной связью, которая могла либо подтвердить, либо опровергнуть это предсказание.
Эксперимент 1
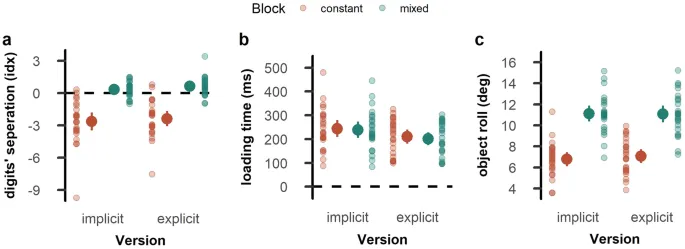
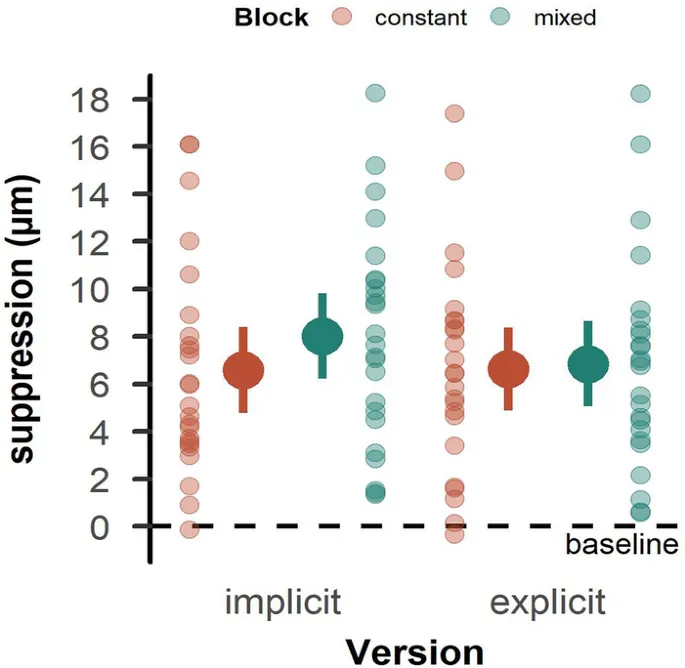
В эксперименте 1 распределение массы могло меняться от пробы к пробе, тогда как в эксперименте 2 мы чередовали более длинные и короткие части с постоянным и переменным распределением массы, одновременно предоставляя неявную или явную информацию о структуре проб.
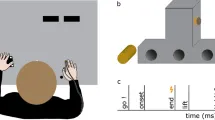
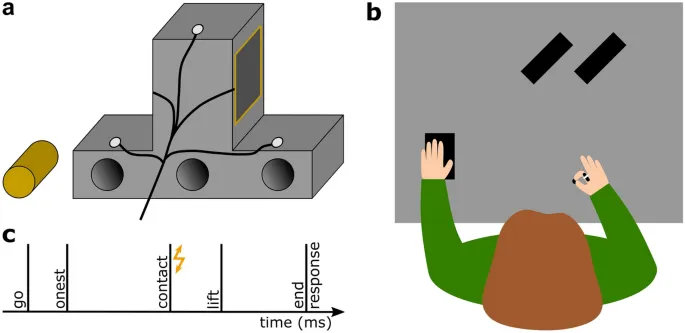
Участники должны были захватывать и поднимать объект в форме перевернутой буквы Т. Объект имел глубину 5 см. Нижняя часть была шириной 15 см и высотой 3 см, а верхняя часть — шириной 5 см и высотой 7 см. На задней стороне нижней части объекта, невидимой для участников, были распределены три трубки laterally (латерально). Цилиндрический кусок латуни (116 г) вставлялся либо в левую, либо в правую трубку, создавая асимметричное распределение массы объекта. Общая масса объекта, включая латунь, составляла 273 г.
Процедура эксперимента
Эксперимент состоял из трех блоков: двух базовых блоков и одного блока захвата. В базовых блоках участники держали правую руку в удобном положении перед собой. Каждая базовая проба начиналась автоматически: пробный вибротактильный стимул предъявлялся, если вообще предъявлялся, через 500 мс после начала пробы. Слуховой сигнал через 500 мс после этого момента побуждал участников нажать кнопку под левым указательным пальцем или большим пальцем и указать, почувствовали они вибрацию или нет, соответственно.
Во время блока захвата каждая проба начиналась с того, что затворные очки становились непрозрачными, а участник сводил кончики большого и указательного пальцев правой руки в стартовой позиции. Экспериментатор вставлял латунный груз в соответствующую трубку, а затем помещал объект в соответствующее положение. После того как экспериментатор нажимал клавишу для начала пробы, затворные очки становились прозрачными, и звуковой сигнал указывал на то, что участники могут начать движение.
Результаты исследований
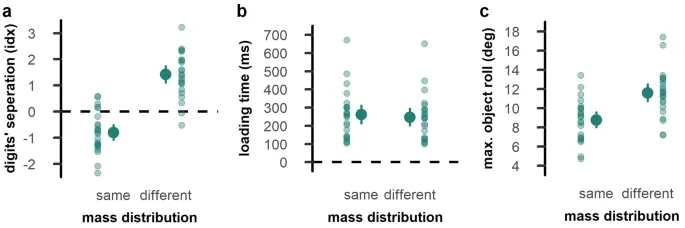
Что касается позиционирования пальцев на объекте, мы обнаружили, что участники захватывали объект, predictively choosing (предсказательно выбирая) точки контакта, которые компенсировали бы распределение массы, испытанное в предыдущей пробе. Однако тактильное подавление во время движения было invariant (инвариантным) across conditions ( across conditions (по всем условиям)).
Эти результаты позволяют предположить, что предсказания, основанные на сенсомоторных воспоминаниях, могут влиять на кинематику движения, но не на связанное с ним тактильное восприятие. В обоих экспериментах участники демонстрировали robust (устойчивое) тактильное подавление во время движения по сравнению с состоянием покоя, что согласуется с предыдущими выводами. Это подтверждает идею о том, что сенсомоторные предсказания, установленные во время движения, снижают associated tactile sensitivity (связанную тактильную чувствительность).
Обсуждение результатов
Целенаправленное поведение в первую очередь основано на визуальной информации. Однако визуальная информация не всегда доступна или информативна в отношении определенных свойств объекта. При взаимодействии с такими объектами люди initially adopt (изначально принимают) «поведение по умолчанию», и если свойства объекта остаются неизменными и возникают repeatedly (повторяющееся), они используют соматосенсорную обратную связь от предыдущего взаимодействия, чтобы предсказать свойства объекта и соответствующим образом скорректировать свое движение.
Второй целью исследования было выяснить, влияет ли тактильная обработка, связанная с захватом и манипуляцией объектами, на предсказания, установленные через сенсомоторные воспоминания. Чтобы capture (зафиксировать) исходное предсказание о динамике объекта на основе поведения объекта в предыдущей пробе и изучить его влияние на тактильную обработку, мы стимулировали в момент первого контакта с объектом, как раз перед тем, как участники поднимали его и получали сенсорную информацию о его распределении массы.
Выводы и значение
Мы демонстрируем, что предсказания, основанные на сенсомоторных воспоминаниях, влияют на кинематику захвата путем регулирования захвата в соответствии с ранее испытанными свойствами объекта. Однако связанное с ним тактильное подавление, по-видимому, устойчиво к таким эффектам предыдущей пробы.
Это исследование вносит важный вклад в наше понимание того, как мозг интегрирует предшествующий опыт и сенсорную информацию для планирования и выполнения движений. Результаты показывают, что хотя моторное планирование сильно зависит от недавнего сенсомоторного опыта, обработка тактильной информации во время движения может регулироваться более универсальными механизмами, которые менее чувствительны к конкретным ожиданиям, основанным на памяти.
Тактильное подавление является процессом, связанным с сенсомоторными предсказаниями, отражающим взаимодействие между predictive and sensory feedback signals (предсказательными и сенсорными обратными сигналами).
Этот вывод имеет значение для различных областей, включая робототехнику, реабилитацию и разработку интерфейсов «мозг-компьютер», где понимание того, как сенсорная и моторная системы взаимодействуют и влияют друг на друга, имеет crucial (решающее) значение.





