Интересное сегодня


Введение
Чувство собственной активности (Sense of Agency, SoA) — это субъективное ощущение контроля над действиями собственного тела и внешними событиями1,2,3,4. Эта тема широко изучается в психологии, нейронауке и инженерии. Исследователи в области психологии и нейронауки фокусируются на механизмах, лежащих в основе SoA, в то время как инженеры интересуются прикладными аспектами, связанными с быстро развивающейся технологией взаимодействия человека и машины. Важно понимать, как люди воспринимают SoA при взаимодействии с системами и совместном управлении объектами или инструментами.
Современные технологии характеризуются разработкой автоматизированных систем, требующих меньшего ручного вмешательства операторов. Операторы, использующие автоматизацию, могут воспринимать такие системы как простые в управлении, поскольку им не приходится выполнять все действия самостоятельно. Однако это может сопровождаться снижением вовлеченности и, как следствие, уменьшением SoA. Исследование Бербериана и др.5 показало, что уровень SoA снижается при увеличении уровня автоматизации от полностью ручного к полностью автоматическому управлению.
SoA играет критическую роль в человеческом поведении и психическом состоянии. Например, SoA связана с выбором действий6,7,8 и необходима для обучения навыкам9. Более того, самогенерируемое движение, то есть движение, сопровождаемое ощущением SoA, может обрабатываться более эффективно, чем движение без него10,11, и может влиять на визуальное восприятие12,13,14. Таким образом, автоматизация, снижая SoA, может изменять поведение операторов, их визуальную обработку и другие аспекты.
Более того, могут возникать серьезные проблемы, когда источник контроля (человек или машина) неясен, а человек находится «вне цикла» управления15,16. Проблема «вне цикла» (out-of-the-loop) снижает способность операторов автоматизированных систем брать на себя ручное управление в случае сбоя автоматики. Даже в современных полностью автоматизированных системах операторам иногда приходится вмешиваться, поскольку системы не всегда справляются со всеми возможными проблемами, особенно с опасными или сложными. Следовательно, проблема «вне цикла» имеет потенциально серьезные последствия во многих сценариях автоматизации.
Для предотвращения проблем «вне цикла» операторы системы должны быть вовлечены в процесс управления. Одним из возможных способов достижения этой цели является поддержание SoA операторов во время автоматического управления17. Если операторы ощущают SoA при управлении объектом, они должны чувствовать себя вовлеченными в контур управления. То есть, ощущение SoA может служить основой для вовлеченности в цикл управления автоматизированными системами во многих ситуациях.
Предыдущие исследования
Недавние исследования изучали SoA при выполнении задач с помощью системной помощи18,19,20. Эти исследования показали, что повышение производительности операторов за счет системной помощи может усилить SoA. Например, участники эксперимента Вен и др.20 управляли движущимся кругом, чтобы доставить его к цели. В некоторых случаях компьютер помогал участникам улучшить их результаты с помощью компьютерного ассистирования (в этих случаях действие участников не полностью отражалось на результате). Результаты показали, что SoA был выше в условиях компьютерной помощи по сравнению с условием самоконтроля. Интересно, что SoA увеличивался за счет помощи, даже если операторы явно осознавали, что компьютер помогает им в выполнении задачи18. Эти исследования также продемонстрировали увеличение SoA в результате компьютерной помощи при наличии значительных задержек между действиями участников и результатами, что делало связь между действием и результатом неопределенной. Этот вывод предполагает, что SoA может поддерживаться, когда действия и результаты не связаны напрямую, но намерения операторов и результаты работы автоматизированной системы совпадают.
В соответствии с этим предположением, Накашима и Кумада21 предположили, что снижение SoA во время автоматизации может быть смягчено характеристиками ситуации использования инструмента, включая наличие целей и постепенное появление результатов. Первое может создать у операторов ощущение соответствия их намерений и результатов работы системы, а второе может привести к неопределенной связи между действиями и результатами. Эти характеристики создают у операторов иллюзорное ощущение совпадения действия и результата.
Цель настоящего исследования
Настоящее исследование было направлено на изучение того, увеличивается ли SoA в условиях автоматического управления с наличием цели и постепенно появляющимся результатом, чтобы далее прояснить SoA при взаимодействии человека и машины. Мы специально сосредоточились на влиянии откликов объекта, не связанных с задачей, на SoA при управлении объектом. SoA в условиях автоматического управления может возникать из-за иллюзорной связи между действиями операторов и результатами, генерируемыми системой. Специфические отклики объекта на действия операторов могут заставить операторов почувствовать, что они контролируют объект, благодаря иллюзорной связи между действием и результатом.
Эксперимент 1: Влияние отклика объекта, зависящего от действия
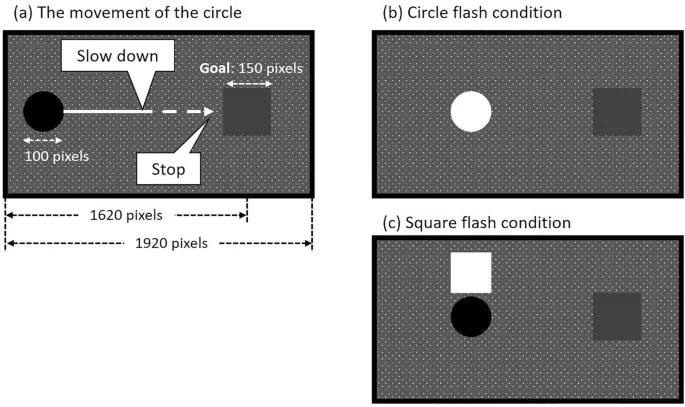
Целью Эксперимента 1 было изучение влияния отклика объекта, не связанного с задачей, на SoA оператора при управлении объектом, который управлялся автоматизированной системой. Задача в этом эксперименте заключалась в создании цели и постепенном замедлении, как было представлено Накашимой и Кумадой21. Участникам предлагалось остановить движущийся круг возле определенной цели, нажимая клавишу в качестве тормоза, что замедляло и останавливало круг (см. Рис. 1а). Важно отметить, что мы явно уведомили участников, что система часто управляла кругом, останавливая его возле целевой области независимо от их нажатий клавиши в экспериментальных пробах.
Мы определили отклики объекта, связанные с нажатием клавиши участниками, как отклики объекта, не связанные с задачей. Мы проверили, усиливает ли мигание объекта в ответ на нажатие клавиши участниками их SoA при остановке объекта, даже если объект управлялся автоматически (Рис. 1б). В блоке «Мигание объекта, зависящее от действия» Эксперимента 1, круг мигал при нажатии клавиши участниками в половине проб (пробы с миганием), тогда как в другой половине круг не мигал (пробы без мигания). Более того, поскольку мигающий объект привлекает внимание к объекту22,23, мы также исследовали взаимосвязь между вниманием и SoA24,25. Мы использовали блок «Случайное мигание объекта», в котором круг мигал случайным образом, независимо от нажатий клавиши, в половине проб, а в другой половине не мигал.
Если отклики объекта, не связанные с задачей, усиливают SoA при управлении (т.е. остановке) объектом, то оценка SoA должна быть выше в пробах с миганием в блоке «Мигание объекта, зависящее от действия». Если захват внимания вызвал высокий SoA, то оценка SoA также должна быть выше в пробах с миганием в блоке «Случайное мигание объекта».
Метод
Участники
В исследовании приняли участие 24 добровольца (возраст: 19–23 года; 10 женщин) с нормальным или скорректированным до нормального зрением. Они не были осведомлены о цели данного исследования. Размер выборки был определен на основе анализа мощности (α = 0,05, мощность = 0,80) с использованием G*power 3.126 для тестирования эффекта среднего размера (f = 0,25). Этот размер выборки был сопоставим с размером выборки в исследовании Накашимы и Кумады21, изучавшего SoA во время автоматизации (n = 27). Все эксперименты данного исследования были одобрены этическим комитетом Riken. Все участники предоставили письменное информированное согласие до начала исследования. Все эксперименты проводились в соответствии с соответствующими руководящими принципами и нормами.
Аппаратура, стимулы и задача
Представление стимулов и регистрация ответов участников контролировались с помощью ПК с программным обеспечением Matlab и Psychtoolbox27,28. Стимулы отображались на 27-дюймовом жидкокристаллическом дисплее (1920 × 1080 пикселей, 60 Гц). Участники отвечали с помощью стандартной десятиклавишной клавиатуры, расположенной перед ними. Участникам было предложено нажимать клавишу предпочитаемой рукой.
Фоновый дисплей (55,5° × 33,0° поля зрения) представлял собой серое поле со случайно распределенными мелкими белыми точками, создающими иллюзию трения. Серый квадрат (цель, 150 × 150 пикселей, 4,7° × 4,7°) располагался справа от дисплея. Центр квадрата находился на расстоянии 1620 пикселей (47,9°) от левого края дисплея. Участникам сообщили, что они управляют (т.е. применяют торможение к) черному кругу диаметром 100 пикселей (3,1°), который двигался прямо к центру дисплея слева в каждой пробе. Начальная позиция круга находилась на 100 пикселей левее края дисплея, так что участники не видели круг в начале пробы. Скорость круга варьировалась от 600 до 880 пикселей/сек с шагом 20 пикселей/сек (т.е. 15 скоростей; 18,7–27,1°/сек) для уменьшения монотонности задачи.
Участникам было предложено нажимать клавишу один раз в каждой пробе для применения торможения к кругу. При применении тормозов круг плавно замедлялся с постоянным замедлением (60 × 9,8 пикселей/с², 18,3°/с²) и останавливался. Им было предложено постараться остановить круг как можно точнее в пределах целевой области. Мы явно уведомили их, что экспериментальные блоки содержат пробы с автоматическим управлением, в которых круг останавливался независимо от их нажатия клавиши. В пробах с автоматическим управлением круг останавливался в случайном месте в пределах ±250 пикселей (±7,8°) от центра цели. Однако мы только сообщили участникам, что круг останавливается возле целевой области в пробах с автоматическим управлением. Мы просили участников нажимать клавишу в каждой пробе, поскольку они вообще не ощущали бы SoA, если бы не предприняли никаких действий. Чтобы побудить участников нажимать клавишу, мы включили в экспериментальный блок пробы с ручным управлением, в которых круг останавливался из-за нажатия клавиши участниками (в одном экспериментальном блоке было 90 проб с автоматическим управлением и 15 проб с ручным управлением). В пробах с ручным управлением торможение применялось через 100 мс после нажатия клавиши участниками.
В каждой пробе после остановки круга появлялся экран ответа. Участники оценивали свое субъективное SoA при остановке круга, т.е. степень, в которой они чувствовали, что остановили круг самостоятельно, вводя число от 0 до 10 (большее число указывало на более сильное SoA).
Процедура
Участники тестировались индивидуально. Они сидели на стуле, а подставка для подбородка фиксировала их голову на расстоянии 57 см от экрана. После прослушивания объяснения о общей процедуре эксперимента они выполнили 15 тренировочных проб (пробы без мигания), в которых торможение применялось немедленно после нажатия клавиши. Цель тренировочных проб заключалась в том, чтобы ознакомить участников с методом ответа и тем, как останавливается круг. Затем они прошли два экспериментальных блока, порядок которых был контрбалансирован между участниками. В каждом блоке (105 проб) мы смешали 90 проб с автоматическим управлением и 15 проб с ручным управлением. Эксперимент состоял из блока «Мигание объекта, зависящее от действия», в котором черный круг мигал, меняя цвет с черного на белый, при нажатии клавиши участниками в половине проб с автоматическим управлением (т.е. 45 проб), и блока «Случайное мигание объекта», в котором черный круг мигал случайным образом, независимо от нажатия клавиши участниками, в половине проб с автоматическим управлением. Круг не мигал в пробах с ручным управлением в любом блоке.
В каждой пробе после остановки круга участники предоставляли оценку SoA для остановки круга на экране ответа. Помимо регистрации оценок SoA (основной зависимый показатель), мы также регистрировали время нажатия клавиши участниками, время применения тормозов, время остановки круга и место остановки круга во всех пробах, а также время мигания круга в пробах с миганием. Каждое зарегистрированное время представляло собой прошедшее время с начала пробы до момента события. Проба завершалась через 1000 мс после того, как круг проходил правый край дисплея, так что участники больше не видели круг на дисплее в пробах с ручным управлением, или через 1000 мс после остановки круга в пробах с автоматическим управлением, даже если они не смогли нажать клавишу. В этих случаях, после отображения предупреждения, напоминающего участникам нажать клавишу, появлялся экран ответа.
Анализ данных
Во-первых, пробы, в которых участники не нажимали клавишу, были исключены из анализа. Мы сосредоточились на данных проб с автоматическим управлением и рассчитали средние оценки SoA для каждого участника в условиях. Затем мы провели двухфакторный дисперсионный анализ с повторными измерениями (ANOVA), где оценки SoA для остановки круга были зависимой переменной, а мигание (мигание против отсутствия мигания) и блок (мигание, зависящее от действия, против случайного мигания) — независимыми переменными. Если взаимодействие было значимым, мы проводили пост-хок анализ с использованием теста простых основных эффектов.
Результаты и обсуждение
Мы исключили 1,2% проб в блоке «Мигание объекта, зависящее от действия» и 1,5% в блоке «Случайное мигание объекта». Таблица 1 суммирует результаты Эксперимента 1 (n = 24). Оценки SoA были относительно выше в пробах с ручным управлением, чем в пробах с автоматическим управлением. ANOVA по оценкам SoA в пробах с автоматическим управлением (Таблица 1а) показала отсутствие значимых основных эффектов (Fs < 0,26), ηp² < 0,379, ηp² < 0,315, ηp² < 0,379, ηp² < 0,192, ηp² < 0,598, ηp² < 0,443, ηp² < 0,129, ηp² < 0,098.
Более длительные задержки приводили к более низкому SoA, делая связь между действием и его эффектом неопределенной, как было предложено в предыдущих исследованиях31,32,33,34,35. Однако в Эксперименте 3 не было значимого эффекта мигания, что указывает на то, что мигание объекта, основанное на действии, не всегда влияет на SoA при управлении объектом. Кроме того, различия в оценках SoA между условиями с миганием и без него были очень малы по сравнению с условиями в пробах с автоматическим управлением (т.е. Эксперименты 1 и 2). Следовательно, эффект мигания может быть специфичен для ситуаций автоматического управления или, по крайней мере, для ситуаций, в которых наблюдатели осознают возможность того, что автоматизированная система управляет объектом.
Общая дискуссия
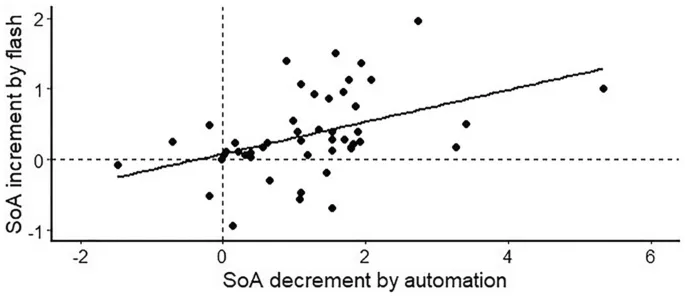
Данное исследование изучало влияние отклика объекта, не связанного с задачей, — мигания объекта — на чувство собственной активности (SoA) при остановке объекта в условиях автоматического управления, когда оператор не контролировал объект. Результаты показали, что, во-первых, SoA при управлении объектом увеличивалось, когда объект реагировал на действия операторов. Во-вторых, критически важным для увеличения SoA было пространственно-временное совпадение отклика объекта с действиями оператора. Следует отметить, что временное совпадение откликов особенно важно. Отклики объекта, пространственно связанные с объектом, но временно не связанные с действием, значительно снижали SoA (Эксперимент 1). Напротив, другие отклики объекта, пространственно не связанные с управляемым объектом, но временно связанные с действием, не вызывали значительного увеличения/уменьшения SoA (Эксперимент 2). В-третьих, отклики объекта, не связанные с задачей, влияли на SoA только в условиях автоматического управления и не влияли в условиях ручного управления. Кроме того, влияние отклика объекта, не связанного с задачей, на SoA было более выраженным у операторов, которые чувствовали более низкий SoA, когда объект управлялся автоматизированной системой.
Действие участников (т.е. нажатие клавиши) в пробах с автоматическим управлением в данном исследовании не было связано с результатом (т.е. остановкой круга). Напротив, мигание круга было связано с действиями участников; следовательно, участники ощущали сильное SoA для мигания круга. SoA для мигания круга могло распространиться на остановку круга, что привело к иллюзорному ощущению SoA для результата, сгенерированного системой.
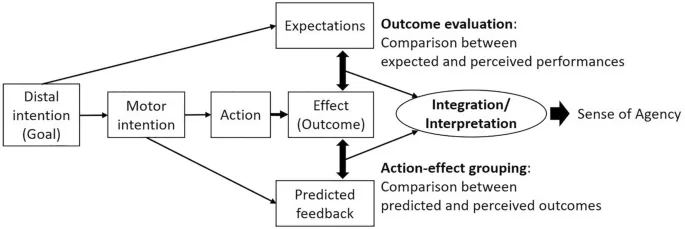
Мы обсудили результаты данного исследования (SoA в условиях автоматического управления) на основе модели SoA. Модифицированная компараторная модель SoA36 — это современная модель, объясняющая SoA людей, принимающих решения о действиях для достижения конкретной цели (см. Рис. 3 для упрощенной концептуальной модели). Эта модель обеспечивает интегрированное описание предиктивных и постдиктивных процессов в SoA. В этой модели достижение конечной цели и моторные намерения порождают два разных пути для сравнения. Во-первых, ожидания генерируются конечным намерением и сравниваются с восприятием производительности в процессе оценки результата. Во-вторых, аналогично оригинальной компараторной модели37,38,39,40, предсказания обратной связи генерируются моторными намерениями и сравниваются с фактической сенсорной обратной связью в процессе группировки действий и результатов. Наконец, интеграция двух сравнений и интерпретаций порождает SoA.
В модифицированной компараторной модели37 первый путь модуляции SoA — это оценка результата (оценка производительности), которая относится к увеличению SoA при хорошей производительности задачи, так что SoA увеличивается, даже если хорошая производительность задачи была результатом системной помощи18,19,20. Наши результаты, однако, показали, что производительность задачи не различалась между условиями с миганием и без него. Следовательно, мы не смогли продемонстрировать, что изменения в производительности усиливают SoA в данном исследовании.
Второй путь — это группировка действий и результатов, которая относится к увеличению SoA, когда действие и результат пространственно-временно согласованы. Однако наши результаты показали, что время действия (нажатие клавиши участниками) не отличалось между условиями с миганием и без него, что не указывало на то, что SoA увеличивался из-за случайных изменений в действиях участников в условии мигания объекта (т.е. случайного сокращения задержки между действием и его результатом). Более того, участники не могли изменить свои действия в зависимости от мигания объекта, поскольку мигание было связано с действием. Поэтому мы не ожидали, что продолжительность между действием и результатом сократится в условии мигания объекта.
Можно возразить, что отклики объекта, не связанные с задачей, синхронизировали результат (т.е. остановку), что привело к сильной группировке действий и результатов (т.е. воспринимаемое время между действием и результатом стало короче). Если бы это было так, то отклик объекта также должен был бы увеличить SoA в условиях ручного управления. Тем не менее, Эксперимент 3 не показал увеличения SoA за счет мигания, зависящего от действия, во время ручного управления. Кроме того, Хаггард и Коул41 предположили, что эффект намеренного связывания (сжатое восприятие интервала между действиями и результатами42) более выражен, когда внимание разделено между событиями, чем когда оно сосредоточено на одном событии. Таким образом, контринтуитивно, фокусировка внимания на объекте, возможно, за счет захвата внимания откликами объекта, зависящими от действия, может заставить наблюдателей воспринимать, что время между действием и результатом стало дольше. В целом, мы предполагаем, что изменения в группировке действий и результатов в ответ на мигание объекта недостаточны для объяснения модуляции SoA в данном исследовании.
Поскольку результаты данного исследования не могут быть объяснены модуляцией двух путей модели SoA, отклики объекта могут влиять на процесс интеграции и интерпретации. В частности, предварительные знания о контексте управления объектом, т.е. знания о ручном или автоматическом управлении, могут быть критически важны. Предварительные знания могут модулировать критерий оценки присвоения результата: операторы могут оценивать присвоение результата на основе критерия «самими наблюдателями или нет» в условиях ручного управления или критерия «системой или нет» в условиях автоматического управления. Отклики объекта, зависящие от действия, могут заставить операторов чувствовать, что система в меньшей степени контролирует объект во время автоматического управления, что приводит к иллюзорно более высокому SoA. То есть, благодаря отклику объекта, они склонны интерпретировать, что результат не приписывается системе, а следовательно, приписывается себе. В отличие от этого, когда операторы осознают, что они контролируют объект в условиях ручного управления, отклики объекта, зависящие от действия, могут оказывать незначительное или нулевое влияние на SoA, поскольку они изначально чувствуют, что контролируют его сами. Фаррер и др.43 предположили, что когда задержка между действием и его результатом увеличивается, участники чувствуют, что их действие отражает результат предвзято, а не действия других отражают результат. Следовательно, более низкий SoA, наблюдаемый при более длительных задержках, может отражать осознание участниками того, что результат напрямую не отражает их действие. В целом, отклик объекта не должен влиять на SoA во время ручного управления, если отклики объекта, зависящие от действия, влияют на критерий присвоения результата, приближая критерий к «не системой».
Экспериментальная задача данного исследования требовала от участников целенаправленного поведения, что могло вызвать очевидное разделение целей между автоматизированной системой и человеком21. Кроме того, отклики системы могли заставить участников почувствовать, что система понимает и учитывает их намерение достичь конечной цели. Эти факторы могут повысить надежность систем. Эти факторы могут создать новую идентичность «мы» между человеком и системой, аналогичную совместным действиям с другими людьми, что приведет к «мы-активности» между ними. Хотя предыдущие исследования сообщали о трудностях в создании «мы-активности» между людьми и машинами44, наше исследование предполагает, как «мы-активность» может развиваться во время взаимодействия человека и машины.
Ограничения исследования
Существуют некоторые ограничения данного исследования. Во-первых, мы оценивали только субъективные оценки SoA. Однако мы могли бы также использовать другие методы для эффективной оценки SoA во время автоматизации. Например, было бы необходимо и интересно исследовать, изменяется ли визуальная обработка или мотивация под влиянием иллюзорного SoA во время автоматизации, поскольку они могут модулироваться SoA6,7,8,9,10,11,12,13,14. Во-вторых, мы должны быть осторожны при обобщении наших результатов на реальные ситуации. Усиление SoA за счет отклика объекта бесполезно, когда операторы просто наблюдают за системой управления (например, в задачах надзора). Выводы данного исследования применимы только к ситуациям, когда люди и системы работают совместно или люди частично управляют системами. Кроме того, наша экспериментальная задача требовала от участников действовать в каждой пробе, и поэтому неясно, могут ли выводы исследования быть применены к ситуациям, когда операторам требуется действовать нечасто. Также необходимо исследовать, могут ли наши выводы быть расширены на ситуации, когда операторам требуется действовать непрерывно18,19,20. Могут существовать другие подходы к поддержанию SoA при полной автоматизации. Исследование таких ситуаций необходимо для прояснения деталей SoA во время автоматизации.
Перспективы
Существуют положительные и отрицательные аспекты поддержания SoA во время автоматизации. Современная автоматизация требует совместного управления оператором и системой. Обычно, чем более доминирующей становится автоматизированная система в управлении, тем меньше SoA ощущает оператор. Отсутствие SoA может привести к снижению вовлеченности операторов, что может быть проблематично, когда требуется принятие решений оператором, т.е. проблема «вне цикла» управления. Предотвращение этой проблемы является положительным аспектом поддержания SoA в условиях автоматического управления. Кроме того, усиление SoA может способствовать построению надежного взаимодействия человека и машины.
С другой стороны, отрицательный аспект поддержания SoA во время автоматизации включает иллюзорное SoA без фактического контроля, что может привести к проблемам в поведении управления (например, небрежное поведение) и вызвать опасные последствия (например, несчастные случаи). Следует также учитывать субъективную ответственность человека за операцию во время автоматизации, когда существует неопределенность относительно того, управляется ли операция человеком или машиной (системой)45,46. Более того, иллюзорное SoA может быть связано с этикой в дизайне систем, где дизайнеры автоматизированных систем могут обманывать пользователей/операторов. Для всестороннего рассмотрения SoA во время автоматизации необходимо учитывать как положительные, так и отрицательные аспекты поддержания/усиления SoA с более широкой точки зрения. Множество вопросов остаются неисследованными в этой области. Мы полагаем, что результаты данного исследования дают конкретные указания на актуальность SoA в области технологий автоматизации47.
В заключение, данное исследование предполагает, что отклик объекта на действия оператора, не связанный с управлением, усиливает SoA при управлении объектами во время автоматизации. Пространственно-временная зависимость между действием оператора и откликом объекта имеет решающее значение для увеличения SoA. Эти предположения важны для разработки совместных систем оператор-автоматизация и обеспечения эффективного совместного управления такими системами.